![]()
wradlib - clutter and beamblockage¶
Overview¶
Within this notebook, we will cover:
- Reading data using xradar
- Clutter detection
- Beam Blockage calculation
Prerequisites¶
| Concepts | Importance | Notes |
|---|---|---|
| Xarray Basics | Helpful | Basic Dataset/DataArray |
| Matplotlib Basics | Helpful | Basic Plotting |
| Intro to Cartopy | Helpful | Projections |
- Time to learn: 10 minutes
Imports¶
import numpy as np
import wradlib as wrl
import matplotlib.pyplot as plt
import xarray as xr
import cartopy
import cartopy.crs as ccrs
import cartopy.feature as cfeature
import xradar as xd
import hvplot
import hvplot.xarrayLoading...
retrieve data from s3 bucket¶
import os
import urllib.request
from pathlib import Path
# Set the URL for the cloud
URL = "https://js2.jetstream-cloud.org:8001/"
path = "pythia/radar/erad2024"
!mkdir -p data
files = [
"20240522_MeteoSwiss_ARPA_Lombardia/Data/Xband/DES_VOL_RAW_20240522_1600.nc",
"wradlib/desio_dem.tif",
]
for file in files:
file_remote = os.path.join(path, file)
file_local = os.path.join("data", Path(file).name)
if not os.path.exists(file_local):
print(f"downloading, {file_local}")
urllib.request.urlretrieve(f"{URL}{file_remote}", file_local)downloading, data/DES_VOL_RAW_20240522_1600.nc
downloading, data/desio_dem.tif
Open CfRadial1 Volume¶
reindex = dict(angle_res=1, direction=1, start_angle=0, stop_angle=360)
dtree = xd.io.open_cfradial1_datatree("data/DES_VOL_RAW_20240522_1600.nc")
display(dtree.load())Loading...
Get first sweep¶
swp = (
dtree["sweep_0"]
.to_dataset()
.wrl.georef.georeference(crs=wrl.georef.get_earth_projection())
.set_coords("sweep_mode")
)
swp.x.attrs = xd.model.get_longitude_attrs()
swp.y.attrs = xd.model.get_latitude_attrs()display(swp)Loading...
Get Digital Elevation Map (DEM)¶
If we have access to the NASA EarthData GESDISC, we can use the BearerToken to retrieve SRTM data corresponding to the actual radar domain. Or we can choose the precompiled GeoTiff.
# extent = [swp.x.min().values, swp.x.max().values, swp.y.min().values, swp.y.max().values]
# import os
# os.environ["WRADLIB_EARTHDATA_BEARER_TOKEN"] = ""
# dem = wrl.io.get_srtm(extent)
# wrl.io.write_raster_dataset("desio_dem.tif", dem)dem = (
xr.open_dataset("data/desio_dem.tif", engine="rasterio")
.isel(band=0)
.rename(band_data="DEM")
.reset_coords("band", drop=True)
)
display(dem)Loading...
Extract radar parameters¶
radar_parameters = dtree["radar_parameters"]bw = radar_parameters["radar_beam_width_h"]
bwLoading...
Prepare DEM for Polar Processing¶
Here the power of xr.apply_ufunc is shown, a wrapper to xarray-ify numpy functions.
def interpolate_dem(obj, dem, **kwargs):
dim0 = obj.wrl.util.dim0()
def wrapper(sx, sy, dx, dy, dem, *args, **kwargs):
y, x = np.meshgrid(dy, dx)
rastercoords = np.dstack([x, y])
polcoords = np.dstack([sx, sy])
return wrl.ipol.cart_to_irregular_spline(rastercoords, dem, polcoords, **kwargs)
out = xr.apply_ufunc(
wrapper,
obj.x,
obj.y,
dem.x,
dem.y,
dem,
input_core_dims=[[dim0, "range"], [dim0, "range"], ["x"], ["y"], ["y", "x"]],
output_core_dims=[[dim0, "range"]],
dask="parallelized",
vectorize=True,
kwargs=kwargs,
dask_gufunc_kwargs=dict(allow_rechunk=True),
)
out.name = "DEM"
return obj.assign(DEM=out)swp = interpolate_dem(swp, dem.DEM, order=3, prefilter=False)swp.DEM.wrl.vis.plot(cmap="terrain", vmin=0)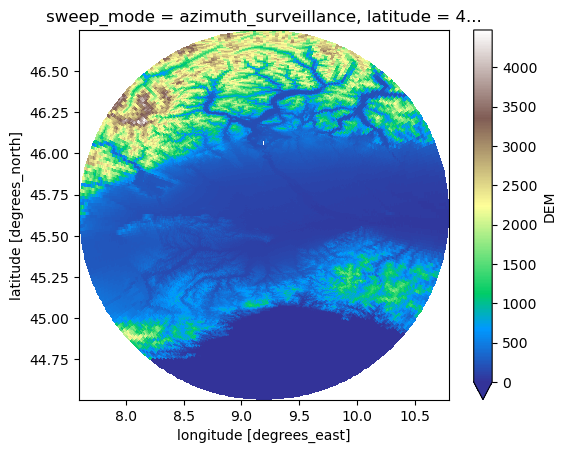
Plot scan strategy¶
nrays = swp.azimuth.size
nbins = swp.range.size
range_res = 300.0
ranges = np.arange(nbins) * range_res
elevs = dtree.root.sweep_fixed_angle.values
sitecoords = (
dtree.root.longitude.values.item(),
dtree.root.latitude.values.item(),
dtree.root.altitude.values.item(),
)
ax = wrl.vis.plot_scan_strategy(
ranges,
elevs,
sitecoords,
beamwidth=radar_parameters["radar_beam_width_h"].values,
terrain=None,
)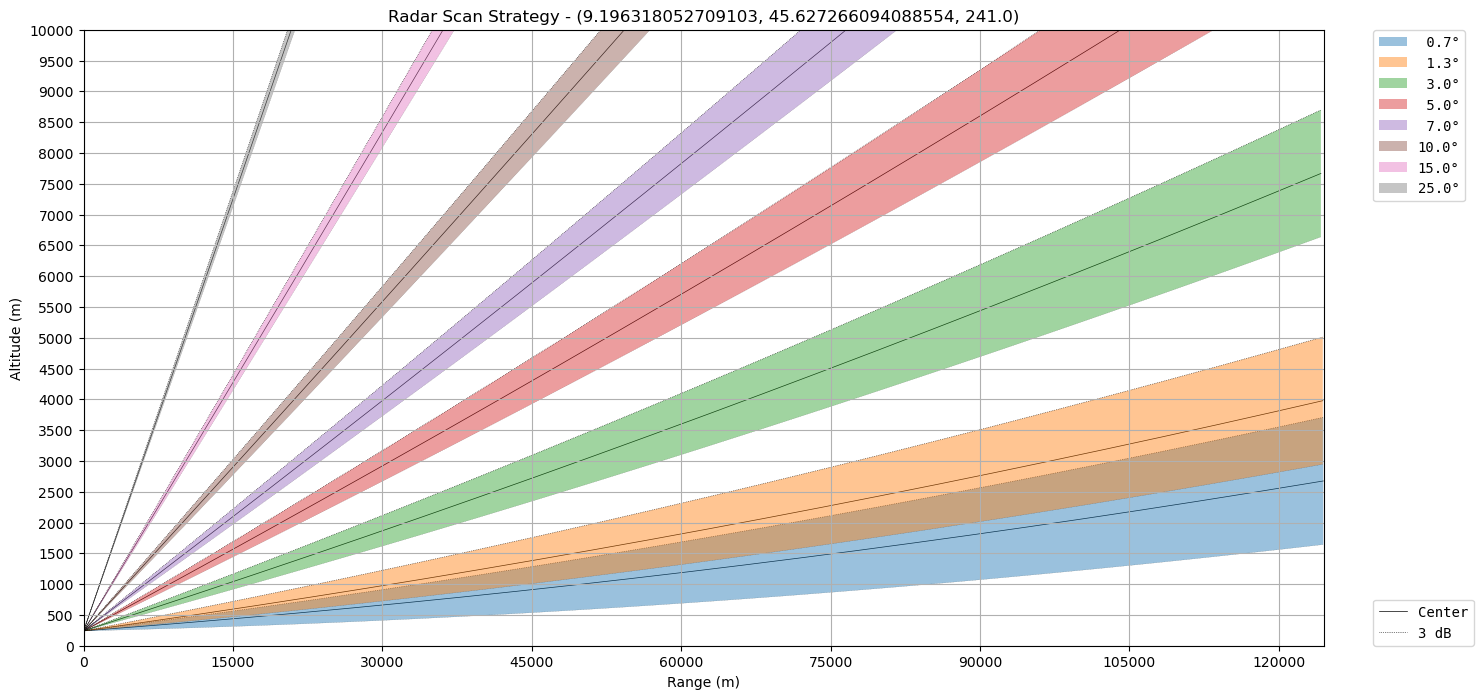
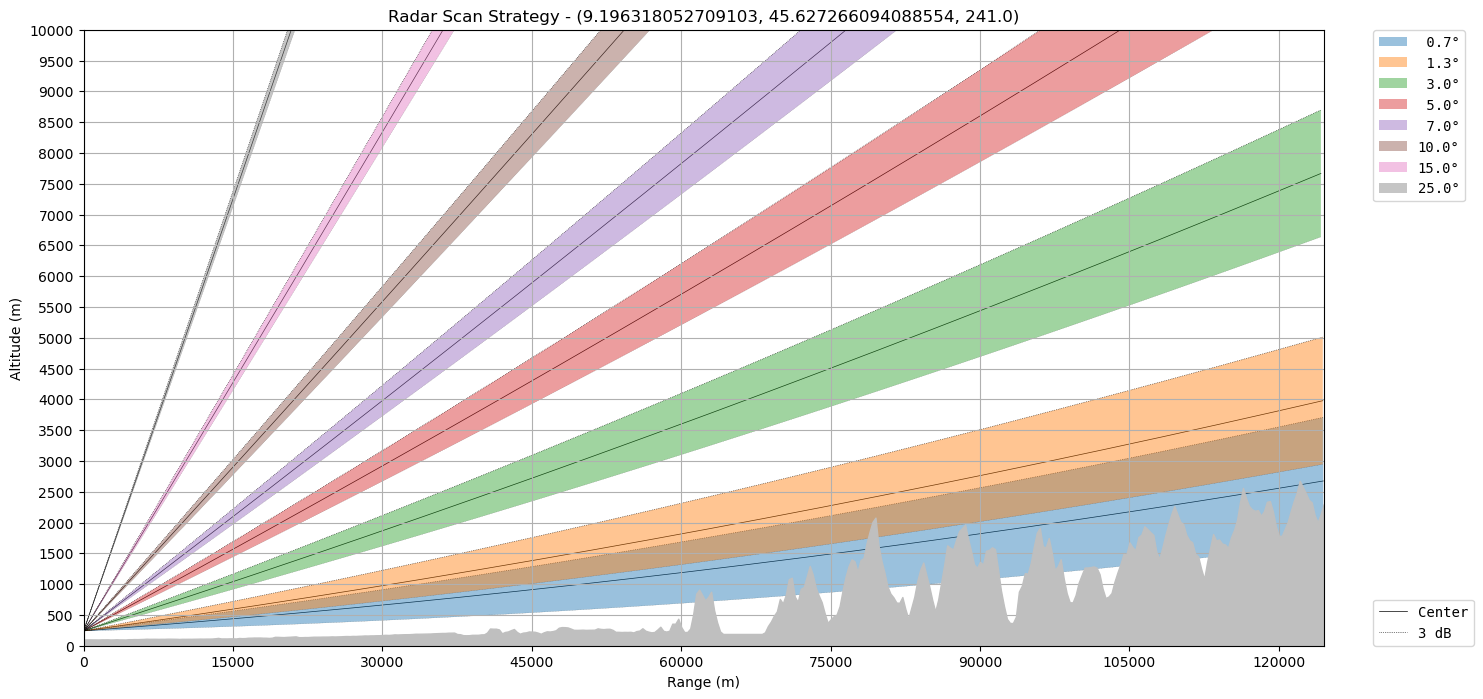
Use terrain=swp.DEM.sel(azimuth=0, method="nearest") to get some arbitrary ray.
ax = wrl.vis.plot_scan_strategy(
ranges,
elevs,
sitecoords,
beamwidth=radar_parameters["radar_beam_width_h"].values,
terrain=swp.DEM.sel(azimuth=0, method="nearest"),
)
Calculate clutter map¶
clmap = swp.DBZ_TOT.wrl.classify.filter_gabella(
wsize=5,
thrsnorain=0.0,
tr1=21.0, # 21.,
n_p=23.0, # 23,
tr2=1.3,
rm_nans=False,
)
swp = swp.assign({"CMAP": clmap})Plot Reflectivities, Clutter and Cluttermap¶
fig = plt.figure(figsize=(15, 12))
ax1 = fig.add_subplot(221)
from osgeo import osr
wgs84 = osr.SpatialReference()
wgs84.ImportFromEPSG(4326)
# swp = swp.sel(range=slice(0, 100000)).set_coords("sweep_mode").wrl.georef.georeference(crs=wgs84)
swp.DBZ_TOT.plot(x="x", y="y", ax=ax1, vmin=0, vmax=60)
ax1.set_title("Reflectivity raw")
ax2 = fig.add_subplot(222)
swp.CMAP.plot(x="x", y="y", ax=ax2)
ax2.set_title("Cluttermap")
ax3 = fig.add_subplot(223)
swp.DBZ_TOT.where(swp.CMAP == 1).plot(x="x", y="y", ax=ax3, vmin=0, vmax=60)
ax3.set_title("Clutter")
ax4 = fig.add_subplot(224)
swp.DBZ_TOT.where(swp.CMAP < 1).plot(x="x", y="y", ax=ax4, vmin=0, vmax=60)
ax4.set_title("Reflectivity clutter removed")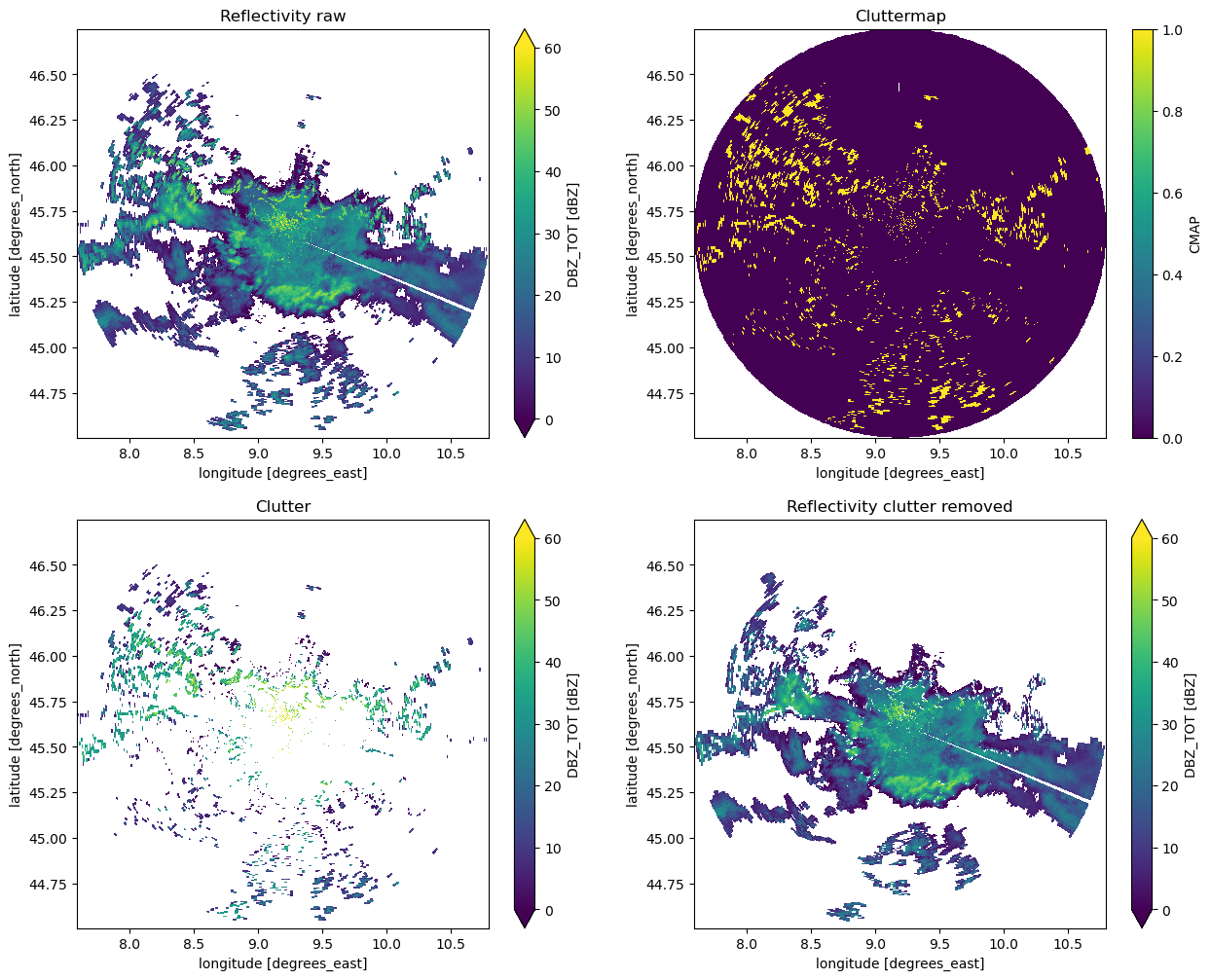
Compare with corrected reflectivity from signal processor¶
plus additional simple RHOHV filter
fig = plt.figure(figsize=(15, 6))
ax1 = fig.add_subplot(121)
swp.DBZ.plot(x="x", y="y", ax=ax1, vmin=0, vmax=60)
ax1.set_title("Reflectivity corr")
ax2 = fig.add_subplot(122)
swp.DBZ_TOT.where((swp.CMAP < 1) & (swp.RHOHV >= 0.8)).plot(
x="x", y="y", ax=ax2, vmin=0, vmax=60
)
ax2.set_title("Reflectivity clutter removed")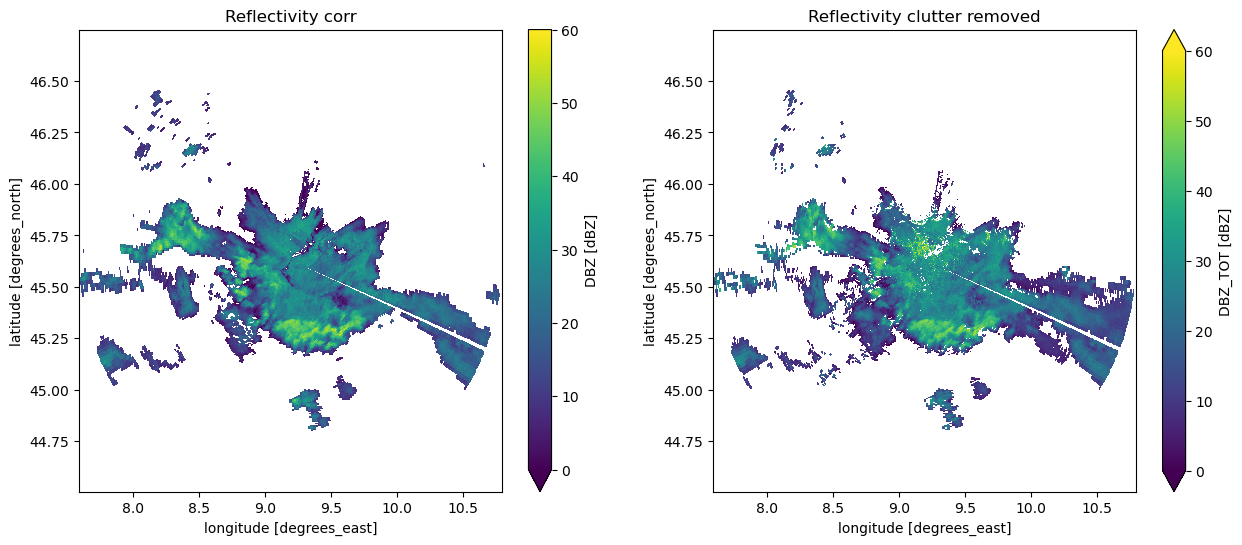
fig = plt.figure(figsize=(8, 5))
ax1 = fig.add_subplot(111)
swp.CMAP.where(swp.CMAP == 1).plot(x="x", y="y", vmin=0, vmax=1, cmap="turbo")
ax1.set_title("Reflectivity corr")
dem.DEM.plot(ax=ax1, zorder=-2, cmap="terrain", vmin=0)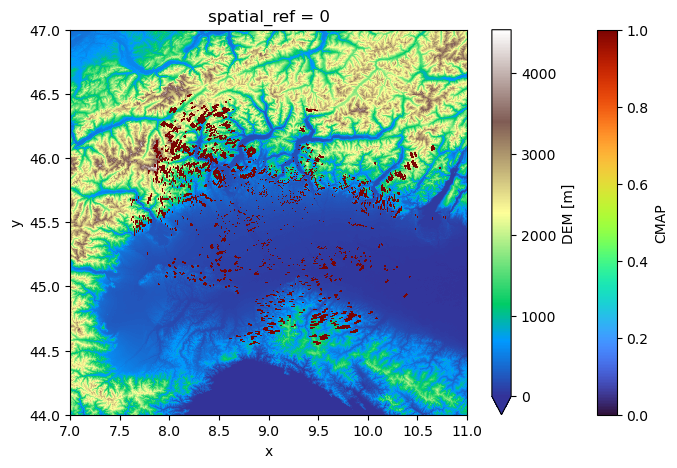
Use hvplot for zooming and panning¶
We need to rechunk the coordinates as hvplot needs chunked variables and coords.
cl = (
swp.CMAP.where(swp.CMAP == 1)
.chunk(chunks={})
.hvplot.quadmesh(
x="x", y="y", cmap="turbo", width=600, height=500, clim=(0, 1), rasterize=True
)
)
dm = dem.DEM.chunk(chunks={}).hvplot(
x="x", y="y", cmap="terrain", width=600, height=500, rasterize=True
)
dm * clLoading...
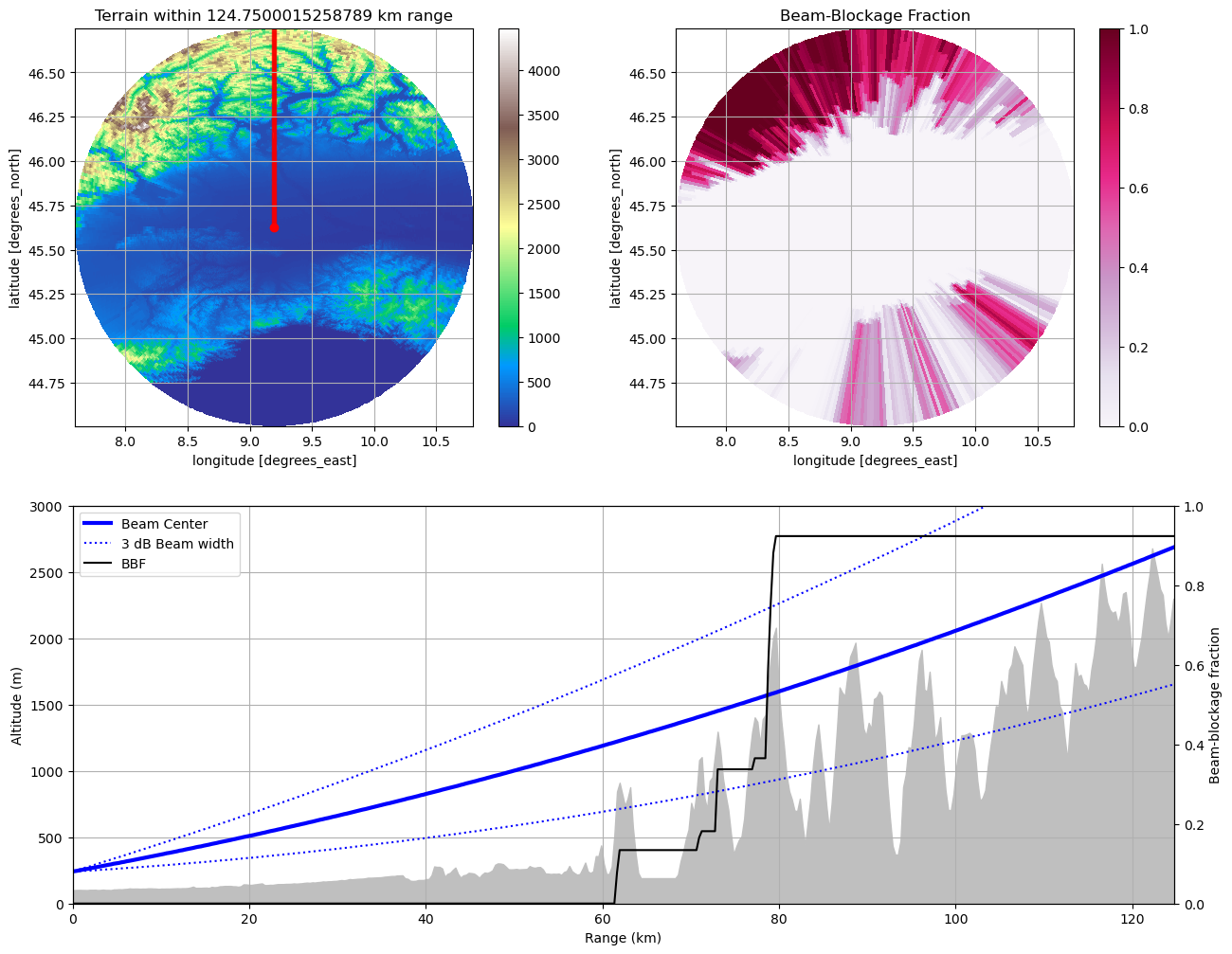
BeamBlockage Calculation¶
Can you xarray-ify the following, too?
beamradius = wrl.util.half_power_radius(swp.range, bw)
PBB = wrl.qual.beam_block_frac(swp.DEM.values, swp.z.values, beamradius)
PBB = np.ma.masked_invalid(PBB)
CBB = wrl.qual.cum_beam_block_frac(PBB)/srv/conda/envs/notebook/lib/python3.11/site-packages/wradlib/qual.py:184: RuntimeWarning: invalid value encountered in sqrt
numer = (ya * np.sqrt(a**2 - y**2)) + (a * np.arcsin(ya)) + (np.pi * a / 2.0)
/srv/conda/envs/notebook/lib/python3.11/site-packages/wradlib/qual.py:184: RuntimeWarning: invalid value encountered in arcsin
numer = (ya * np.sqrt(a**2 - y**2)) + (a * np.arcsin(ya)) + (np.pi * a / 2.0)
swp = swp.assign(
CBB=(["azimuth", "range"], CBB),
PBB=(["azimuth", "range"], PBB),
)# just a little helper function to style x and y axes of our maps
def annotate_map(ax, cm=None, title=""):
# ticks = (ax.get_xticks() / 1000).astype(int)
# ax.set_xticklabels(ticks)
# ticks = (ax.get_yticks() / 1000).astype(int)
# ax.set_yticklabels(ticks)
# ax.set_xlabel("Kilometers")
# ax.set_ylabel("Kilometers")
if not cm is None:
plt.colorbar(cm, ax=ax)
if not title == "":
ax.set_title(title)
ax.grid()import matplotlib as mpl
sitecoords = (swp.longitude.values, swp.latitude.values, swp.altitude.values)
r = swp.range.values
az = swp.azimuth.values
alt = swp.z.values
fig = plt.figure(figsize=(15, 12))
# create subplots
ax1 = plt.subplot2grid((2, 2), (0, 0))
ax2 = plt.subplot2grid((2, 2), (0, 1))
ax3 = plt.subplot2grid((2, 2), (1, 0), colspan=2, rowspan=1)
# azimuth angle
angle = 0
# Plot terrain (on ax1)
dem_pm = swp.DEM.wrl.vis.plot(ax=ax1, cmap=mpl.cm.terrain, vmin=0.0, add_colorbar=False)
swp.sel(azimuth=0, method="nearest").plot.scatter(
x="x", y="y", marker=".", color="r", alpha=0.2, ax=ax1
)
ax1.plot(swp.longitude.values, swp.latitude.values, "ro")
annotate_map(
ax1,
dem_pm,
"Terrain within {0} km range".format(np.max(swp.range.values / 1000.0) + 0.1),
)
# Plot CBB (on ax2)
cbb = swp.CBB.wrl.vis.plot(ax=ax2, cmap=mpl.cm.PuRd, vmin=0, vmax=1, add_colorbar=False)
annotate_map(ax2, cbb, "Beam-Blockage Fraction")
# Plot single ray terrain profile on ax3
(bc,) = ax3.plot(
swp.range / 1000.0, swp.z[angle, :], "-b", linewidth=3, label="Beam Center"
)
(b3db,) = ax3.plot(
swp.range.values / 1000.0,
(swp.z[angle, :] + beamradius),
":b",
linewidth=1.5,
label="3 dB Beam width",
)
ax3.plot(swp.range / 1000.0, (swp.z[angle, :] - beamradius), ":b")
ax3.fill_between(swp.range / 1000.0, 0.0, swp.DEM[angle, :], color="0.75")
ax3.set_xlim(0.0, np.max(swp.range / 1000.0) + 0.1)
ax3.set_ylim(0.0, 3000)
ax3.set_xlabel("Range (km)")
ax3.set_ylabel("Altitude (m)")
ax3.grid()
axb = ax3.twinx()
(bbf,) = axb.plot(swp.range / 1000.0, swp.CBB[angle, :], "-k", label="BBF")
axb.set_ylabel("Beam-blockage fraction")
axb.set_ylim(0.0, 1.0)
axb.set_xlim(0.0, np.max(swp.range / 1000.0) + 0.1)
legend = ax3.legend(
(bc, b3db, bbf),
("Beam Center", "3 dB Beam width", "BBF"),
loc="upper left",
fontsize=10,
)
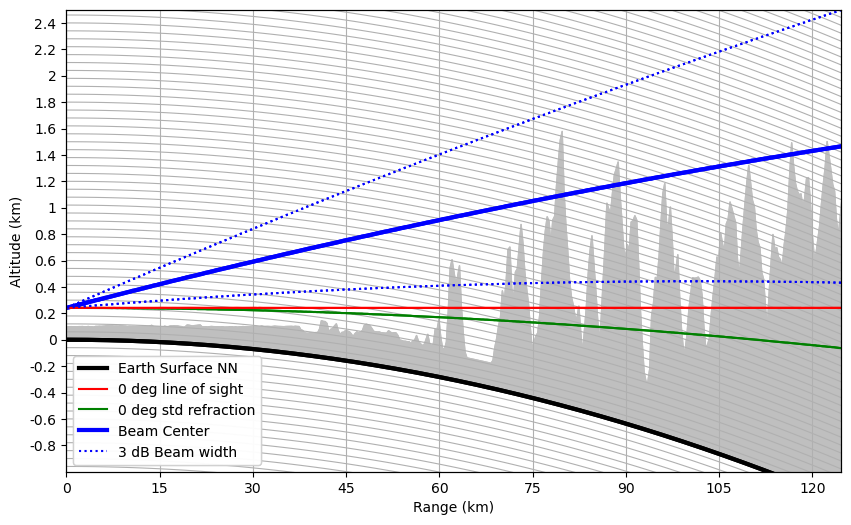
Some EyeCandy¶
def height_formatter(x, pos):
x = (x - 6370000) / 1000
fmt_str = "{:g}".format(x)
return fmt_str
def range_formatter(x, pos):
x = x / 1000.0
fmt_str = "{:g}".format(x)
return fmt_strfig = plt.figure(figsize=(10, 6))
cgax, caax, paax = wrl.vis.create_cg(fig=fig, rot=0, scale=1)
# azimuth angle
angle = 0
# fix grid_helper
er = 6370000
gh = cgax.get_grid_helper()
gh.grid_finder.grid_locator2._nbins = 80
gh.grid_finder.grid_locator2._steps = [1, 2, 4, 5, 10]
# calculate beam_height and arc_distance for ke=1
# means line of sight
bhe = wrl.georef.bin_altitude(r, 0, sitecoords[2], re=er, ke=1.0)
ade = wrl.georef.bin_distance(r, 0, sitecoords[2], re=er, ke=1.0)
nn0 = np.zeros_like(r)
# for nice plotting we assume earth_radius = 6370000 m
ecp = nn0 + er
# theta (arc_distance sector angle)
thetap = -np.degrees(ade / er) + 90.0
# zero degree elevation with standard refraction
bh0 = wrl.georef.bin_altitude(r, 0, sitecoords[2], re=er)
# plot (ecp is earth surface normal null)
(bes,) = paax.plot(thetap, ecp, "-k", linewidth=3, label="Earth Surface NN")
(bc,) = paax.plot(thetap, ecp + alt[angle, :], "-b", linewidth=3, label="Beam Center")
(bc0r,) = paax.plot(thetap, ecp + bh0, "-g", label="0 deg Refraction")
(bc0n,) = paax.plot(thetap, ecp + bhe, "-r", label="0 deg line of sight")
(b3db,) = paax.plot(
thetap, ecp + alt[angle, :] + beamradius, ":b", label="+3 dB Beam width"
)
paax.plot(thetap, ecp + alt[angle, :] - beamradius, ":b", label="-3 dB Beam width")
# orography
paax.fill_between(thetap, ecp, ecp + swp.DEM[angle, :], color="0.75")
# shape axes
cgax.set_xlim(0, np.max(ade))
cgax.set_ylim([ecp.min() - 1000, ecp.max() + 2500])
caax.grid(True, axis="x")
cgax.grid(True, axis="y")
cgax.axis["top"].toggle(all=False)
caax.yaxis.set_major_locator(
mpl.ticker.MaxNLocator(steps=[1, 2, 4, 5, 10], nbins=20, prune="both")
)
caax.xaxis.set_major_locator(mpl.ticker.MaxNLocator())
caax.yaxis.set_major_formatter(mpl.ticker.FuncFormatter(height_formatter))
caax.xaxis.set_major_formatter(mpl.ticker.FuncFormatter(range_formatter))
caax.set_xlabel("Range (km)")
caax.set_ylabel("Altitude (km)")
legend = paax.legend(
(bes, bc0n, bc0r, bc, b3db),
(
"Earth Surface NN",
"0 deg line of sight",
"0 deg std refraction",
"Beam Center",
"3 dB Beam width",
),
loc="lower left",
fontsize=10,
)
Summary¶
We’ve just learned how to use ’s Gabella clutter detection for single sweeps. We’ve looked into digital elevation maps and beam blockage calculations.