LROSE Wind Tutorial
This interactive tutorial takes you through the steps of how to run FRACTL and SAMURAI. FRACTL is a fast traditional solver with integrated interpolation using LROSE infrastructure, and it is able to perform both gridding and multi-Doppler synthesis for airborne radars and multiple ground-based radars. This is different than Radx2Grid which is only capable of gridding data for a single ground-based radar. FRACTL adopts techniques from older REORDER and CEDRIC software, but with some new improvements. In contrast to the older tools, in which interpolation is followed by synthesis, FRACTL does both steps together. FRACTL doesn’t require the CfRadial file with an aggregation of the sweeps, which is different than Radx2Grid. FRACTL performs a nearest neighbor interpolation of the reflectivity instead of bilinear interpolation in Radx2Grid. It combines the Doppler velocities together using the traditional ‘normal’ equations but with singular value decomposition of raw velocities in spherical space rather than Cramer’s rule in gridded space like CEDRIC.
SAMURAI is a variational analysis technique that is described in Bell et al. (2012), Foerster et al. (2014), Foerster and Bell (2017), Cha and Bell (2021), and other publications. The SAMURAI analysis yields a maximum likelihood estimate of the atmospheric state for a given set of observations and error estimates by minimizing a variational cost function. It has more features and more development than FRACTL, and is generally recommended over the former for publication-quality analysis. The two programs together provide a powerful combination to produce high quality multi-Doppler wind fields from ground-based, airborne, or mixed configurations.
Tutorial Overview
1. Setup

Required input data, FRACTL and SAMURAI parameter files, and a SAMURAI center file:
a. QC-ed radar data files will be used in this example:
cfrad.20080411_182140.206_to_20080411_182632.190_KHTX_SUR.nc
cfrad.20080411_182230.747_to_20080411_182629.530_ARMOR_SUR.nc
*The QC process is not included in this tutorial.
b. Parameter files:
fractl_params
samurai_params
Note: The parameter file have already been modified to run straight out of the box.
c. Center file:
Note: The .cen file was generated by the provided Perl script. The center file is used in SAMURAI to define a static or moving Cartesian frame of reference for the analysis. It can be used to time-space correct the position of radar data in a moving storm system. It also sets the temporal limits for data to be included in the analysis.
Generate_center.pl
20080411.cen
Environment and packages¶
First, we import the required python packages to run this notebook. Most of the LROSE processing can be done with the os package and shell commands.
import os
#### Need to modify later
os.environ['BASE_DIR'] = os.getcwd()
os.environ['LROSE_DIR'] = '/usr/local/lrose/bin'
base_dir = os.environ['BASE_DIR']
!echo "Base directory: "$BASE_DIR
!echo "LROSE Directory: "$LROSE_DIR
Base directory: /bell-scratch/tcha/LROSE/AMSRadar2023/ams-open-radar-2023/notebooks/lrose
The required data is under the data directory, and the parameter files used for the tutorial are under the params directory. We will organize the directory by performing the following commands:
# create samurai output directory
!rm -rf ${BASE_DIR}/output_sam
!mkdir ${BASE_DIR}/output_sam
# create samurai output directory
!rm -rf ${BASE_DIR}/output_frac
!mkdir ${BASE_DIR}/output_frac
2. Prepare data for analysis
In this tutorial, the provided data have already been QC-ed. For a standard procedure, users are recommended to perform the following procedure:
Convert radar data from level 2 or other native format to CfRadial using RadxConvert
SAMURAI can also incorporate non-radar data, and can read many commonly used formats. All data files in the
datadirectory will be included in the analysis. The read subroutine for each datatype is determined by the file suffix.
Quality-controlled raw data by desired QC-tools. See the QC tutorial for an example of how QC can be done; HawkEdit and Solo can also be used to QC data.
3. Set the FRACTL parameters
If starting from scratch, generate a parameter file using
fractl -print_params > fractl_paramsModify the parameter file
Most of the defaults are fine for many analyses. The following are the minimum ones you need to set:
GRID SPEC
zGrid [line 190], yGrid [line 200], xGrid [line 210]: These determine the grid increment and size of the domain. With FRACTL, you can just set the increment and let the program figure out the domain size if you prefer. In that use case, it picks a rectangular domain that incorporates all the radar data provided.
PROJECTION
projLat0 [line 255], projLon0 [line 265]: The origin is an arbitrarily chosen point, but should be relevant for your objective. For example, it can be the geographical center of your multi-radar domain, the physical location of a radar for a single-radar domain, or the location of a feature of interest within your dataset (such as storm center). The latitude and longitude of your chosen origin should be given in decimal degrees.
FILES AND DIRECTORIES
inDir [line 453]: This is the input data directory
fileRegex [line 463]: This is a regular expression used to filter out the data types used for analysis. It should generally be ^cfrad, to find files that start with cfrad prefix.
outNc [line 496]: This is the output directory where the analysis will go.
FIELDS
radialName [line 512]: Variable name for the Doppler velocity
dbzName [line 522]: Variable name for the reflectivity
ncpName [line 532]: Variable name for the normalized coherent power. This variable can be used to do some simple QC thresholding. If you don’t have NCP or SQI in your data then just point this to any other variable and make sure the thresholding is turned off (which is the default). The specification of NCP will be optional in future versions of FRACTL.
4. Run FRACTL
After modifying the parameter file, directing to the parameter file by typing the -params flags
!${LROSE_DIR}/fractl -params ${BASE_DIR}/params/fractl_params
/bin/bash: fractl: command not found
5. Plot FRACTL results
Environment and packages
Import the packages to plot the FRACTL output. These are pre-installed for this tutorial, but if you run this notebook on your own computer you may need to install them yourself using the following code (where scipy is a representative example):
import sys
!{sys.executable} -m pip install scipy
or
!{sys.executable} -m conda install scipy
depending on your system
import matplotlib.pyplot as plt
import matplotlib.colors as colors
import numpy as np
import xarray as xr
import matplotlib as mpl
import cartopy.crs as ccrs
from metpy.plots import ctables
from cartopy.mpl.gridliner import LONGITUDE_FORMATTER, LATITUDE_FORMATTER
mpl.rcParams['figure.dpi'] = 300
Load the netcdf file
inDir = base_dir+"/output_frac/20080411/"
file = "ncf_20080411_182632.nc"
ds_radar = xr.open_dataset(inDir+file).squeeze()
ds_radar.load()
<xarray.Dataset>
Dimensions: (z0: 30, y0: 171, x0: 191)
Coordinates:
time datetime64[ns] 2008-04-11T18:26:32.190000128
* z0 (z0) float64 0.0 500.0 1e+03 ... 1.35e+04 1.4e+04 1.45e+04
* y0 (y0) float64 -7e+04 -6.9e+04 -6.8e+04 ... 9.9e+04 1e+05
* x0 (x0) float64 -1.2e+05 -1.19e+05 -1.18e+05 ... 6.9e+04 7e+04
Data variables: (12/14)
grid_mapping_0 int32 0
lat0 (y0, x0) float64 34.01 34.01 34.01 ... 35.55 35.55 35.55
lon0 (y0, x0) float64 -88.07 -88.06 -88.05 ... -86.01 -86.0
start_time float64 1.208e+09
stop_time float64 1.208e+09
W (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
... ...
DBZ (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
NCP (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
conditionNumber (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
W_std (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
V_std (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
U_std (z0, y0, x0) float32 nan nan nan nan ... nan nan nan nan
Attributes:
Conventions: CF-1.5- z0: 30
- y0: 171
- x0: 191
- time()datetime64[ns]2008-04-11T18:26:32.190000128
- standard_name :
- time
array('2008-04-11T18:26:32.190000128', dtype='datetime64[ns]') - z0(z0)float640.0 500.0 ... 1.4e+04 1.45e+04
- standard_name :
- height
- units :
- m
- positive :
- up
array([ 0., 500., 1000., 1500., 2000., 2500., 3000., 3500., 4000., 4500., 5000., 5500., 6000., 6500., 7000., 7500., 8000., 8500., 9000., 9500., 10000., 10500., 11000., 11500., 12000., 12500., 13000., 13500., 14000., 14500.]) - y0(y0)float64-7e+04 -6.9e+04 ... 9.9e+04 1e+05
- standard_name :
- projection_y_coordinate
- units :
- m
array([-70000., -69000., -68000., -67000., -66000., -65000., -64000., -63000., -62000., -61000., -60000., -59000., -58000., -57000., -56000., -55000., -54000., -53000., -52000., -51000., -50000., -49000., -48000., -47000., -46000., -45000., -44000., -43000., -42000., -41000., -40000., -39000., -38000., -37000., -36000., -35000., -34000., -33000., -32000., -31000., -30000., -29000., -28000., -27000., -26000., -25000., -24000., -23000., -22000., -21000., -20000., -19000., -18000., -17000., -16000., -15000., -14000., -13000., -12000., -11000., -10000., -9000., -8000., -7000., -6000., -5000., -4000., -3000., -2000., -1000., 0., 1000., 2000., 3000., 4000., 5000., 6000., 7000., 8000., 9000., 10000., 11000., 12000., 13000., 14000., 15000., 16000., 17000., 18000., 19000., 20000., 21000., 22000., 23000., 24000., 25000., 26000., 27000., 28000., 29000., 30000., 31000., 32000., 33000., 34000., 35000., 36000., 37000., 38000., 39000., 40000., 41000., 42000., 43000., 44000., 45000., 46000., 47000., 48000., 49000., 50000., 51000., 52000., 53000., 54000., 55000., 56000., 57000., 58000., 59000., 60000., 61000., 62000., 63000., 64000., 65000., 66000., 67000., 68000., 69000., 70000., 71000., 72000., 73000., 74000., 75000., 76000., 77000., 78000., 79000., 80000., 81000., 82000., 83000., 84000., 85000., 86000., 87000., 88000., 89000., 90000., 91000., 92000., 93000., 94000., 95000., 96000., 97000., 98000., 99000., 100000.]) - x0(x0)float64-1.2e+05 -1.19e+05 ... 7e+04
- standard_name :
- projection_x_coordinate
- units :
- m
array([-120000., -119000., -118000., -117000., -116000., -115000., -114000., -113000., -112000., -111000., -110000., -109000., -108000., -107000., -106000., -105000., -104000., -103000., -102000., -101000., -100000., -99000., -98000., -97000., -96000., -95000., -94000., -93000., -92000., -91000., -90000., -89000., -88000., -87000., -86000., -85000., -84000., -83000., -82000., -81000., -80000., -79000., -78000., -77000., -76000., -75000., -74000., -73000., -72000., -71000., -70000., -69000., -68000., -67000., -66000., -65000., -64000., -63000., -62000., -61000., -60000., -59000., -58000., -57000., -56000., -55000., -54000., -53000., -52000., -51000., -50000., -49000., -48000., -47000., -46000., -45000., -44000., -43000., -42000., -41000., -40000., -39000., -38000., -37000., -36000., -35000., -34000., -33000., -32000., -31000., -30000., -29000., -28000., -27000., -26000., -25000., -24000., -23000., -22000., -21000., -20000., -19000., -18000., -17000., -16000., -15000., -14000., -13000., -12000., -11000., -10000., -9000., -8000., -7000., -6000., -5000., -4000., -3000., -2000., -1000., 0., 1000., 2000., 3000., 4000., 5000., 6000., 7000., 8000., 9000., 10000., 11000., 12000., 13000., 14000., 15000., 16000., 17000., 18000., 19000., 20000., 21000., 22000., 23000., 24000., 25000., 26000., 27000., 28000., 29000., 30000., 31000., 32000., 33000., 34000., 35000., 36000., 37000., 38000., 39000., 40000., 41000., 42000., 43000., 44000., 45000., 46000., 47000., 48000., 49000., 50000., 51000., 52000., 53000., 54000., 55000., 56000., 57000., 58000., 59000., 60000., 61000., 62000., 63000., 64000., 65000., 66000., 67000., 68000., 69000., 70000.])
- grid_mapping_0()int320
- grid_mapping_name :
- transverse_mercator
- semi_major_axis :
- 6378137.0
- semi_minor_axis :
- 6378137.0
- inverse_flattening :
- 298.257223563
- latitude_of_projection_origin :
- 34.6462
- longitude_of_projection_origin :
- -86.7715
- false_easting :
- 0
- false_northing :
- 0
array(0, dtype=int32)
- lat0(y0, x0)float6434.01 34.01 34.01 ... 35.55 35.55
- standard_name :
- latitude
- units :
- degrees_north
array([[34.00804435, 34.00815827, 34.00827124, ..., 34.01270485, 34.01263953, 34.01257326], [34.01706092, 34.01717488, 34.01728789, ..., 34.021723 , 34.02165766, 34.02159136], [34.02607748, 34.02619148, 34.02630453, ..., 34.03074114, 34.03067577, 34.03060945], ..., [35.52263481, 35.52275531, 35.5228748 , ..., 35.5275643 , 35.52749521, 35.52742511], [35.53164905, 35.53176959, 35.53188912, ..., 35.53658017, 35.53651106, 35.53644094], [35.54066328, 35.54078386, 35.54090343, ..., 35.54559603, 35.5455269 , 35.54545675]]) - lon0(y0, x0)float64-88.07 -88.06 ... -86.01 -86.0
- standard_name :
- longitude
- units :
- degrees_east
array([[-88.0710154 , -88.06018852, -88.04936157, ..., -86.03505153, -86.0242222 , -86.01339292], [-88.0711528 , -88.06032477, -88.04949669, ..., -86.03497364, -86.02414317, -86.01331274], [-88.07129026, -88.06046109, -88.04963186, ..., -86.03489572, -86.02406411, -86.01323253], ..., [-88.09497649, -88.08395011, -88.07292367, ..., -86.02146929, -86.01044029, -85.99941132], [-88.09512453, -88.08409692, -88.07306925, ..., -86.02138537, -86.01035513, -85.99932494], [-88.09527264, -88.0842438 , -88.0732149 , ..., -86.02130141, -86.01026994, -85.99923851]]) - start_time()float641.208e+09
- standard_name :
- start_time
- units :
- s
array(1.2079381e+09)
- stop_time()float641.208e+09
- standard_name :
- stop_time
- units :
- s
array(1.20793839e+09)
- W(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- upward_air_velocity
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - V(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- northward_wind
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - U(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- eastward_wind
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DBZ(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- mean_neighbor_dbz
- units :
- 1
- grid_mapping :
- grid_mapping_0
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - NCP(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- mean_neighbor_ncp
- units :
- 1
- grid_mapping :
- grid_mapping_0
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - conditionNumber(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- matrix_condition_number
- units :
- 1
- grid_mapping :
- grid_mapping_0
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - W_std(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- w_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - V_std(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- v_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - U_std(z0, y0, x0)float32nan nan nan nan ... nan nan nan nan
- standard_name :
- u_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32)
- Conventions :
- CF-1.5
## Get variables:
da_DBZ = ds_radar['DBZ']
da_U = ds_radar['U']
da_V = ds_radar['V']
da_W = ds_radar['W']
da_CN = ds_radar['conditionNumber']
lon, lat = np.meshgrid( ds_radar.lon0, ds_radar.lat0 )
## Set NWS reflectivity colorbar:
ref_norm, ref_cmap = ctables.registry.get_with_steps('NWSStormClearReflectivity', -20, 0.5)
plotting_alt=3*1000 # altitude at 3 km
plotting_var = ds_radar.DBZ.sel(z0=plotting_alt).data
plotting_var_u = ds_radar.U.sel(z0=plotting_alt).data
plotting_var_v = ds_radar.V.sel(z0=plotting_alt).data
plotting_lon = ds_radar.lon0
plotting_lat = ds_radar.lat0
fig = plt.figure(figsize=(12,12))
ax = plt.axes(projection=ccrs.PlateCarree())
# stamen_terrain = cimgt.Stamen('terrain')
# ax.add_image(stamen_terrain, 8)
ext = 0#0.02
ax.set_extent([np.min(lon)+ext, np.max(lon)-ext, np.min(lat)+ext, np.max(lat)-ext], crs=ccrs.PlateCarree())
cf1 = ax.pcolormesh( plotting_lon, plotting_lat, plotting_var
, cmap=ref_cmap, norm=ref_norm
, alpha=0.8
, shading='auto'
, transform=ccrs.PlateCarree()
)
step = 4
cf_q = ax.quiver( plotting_lon[::step, ::step], plotting_lat[::step, ::step]
, plotting_var_u[::step, ::step], plotting_var_v[::step, ::step]
, scale=600
, width=0.004
, color='k'
, transform=ccrs.PlateCarree()
)
# radar locations (ARMOR, KHTX)
radar_lats = [34.6462, 34.9306]
radar_lons = [-86.7715, -86.0836]
ax.scatter(radar_lons, radar_lats, c='r', marker='P', s=120, transform=ccrs.PlateCarree())
ax.text(radar_lons[0]-0.12, radar_lats[0]-0.08, 'ARMOR', color='r', transform=ccrs.PlateCarree(), fontsize=20)
ax.text(radar_lons[1]-0.08, radar_lats[1]-0.08, 'KHTX', color='r', transform=ccrs.PlateCarree(), fontsize=20)
gl = ax.gridlines(crs=ccrs.PlateCarree(), draw_labels=True,
linewidth=2, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
gl.xformatter = LONGITUDE_FORMATTER
gl.yformatter = LATITUDE_FORMATTER
cbar_ax = fig.add_axes([0.95, 0.3, 0.02, 0.4])
cbar = fig.colorbar(cf1, cax=cbar_ax, fraction=0.04)
cbar.ax.tick_params(labelsize=14)
cbar.ax.set_title('[dBZ]', fontsize=14, y=-0.1)
Text(0.5, -0.1, '[dBZ]')
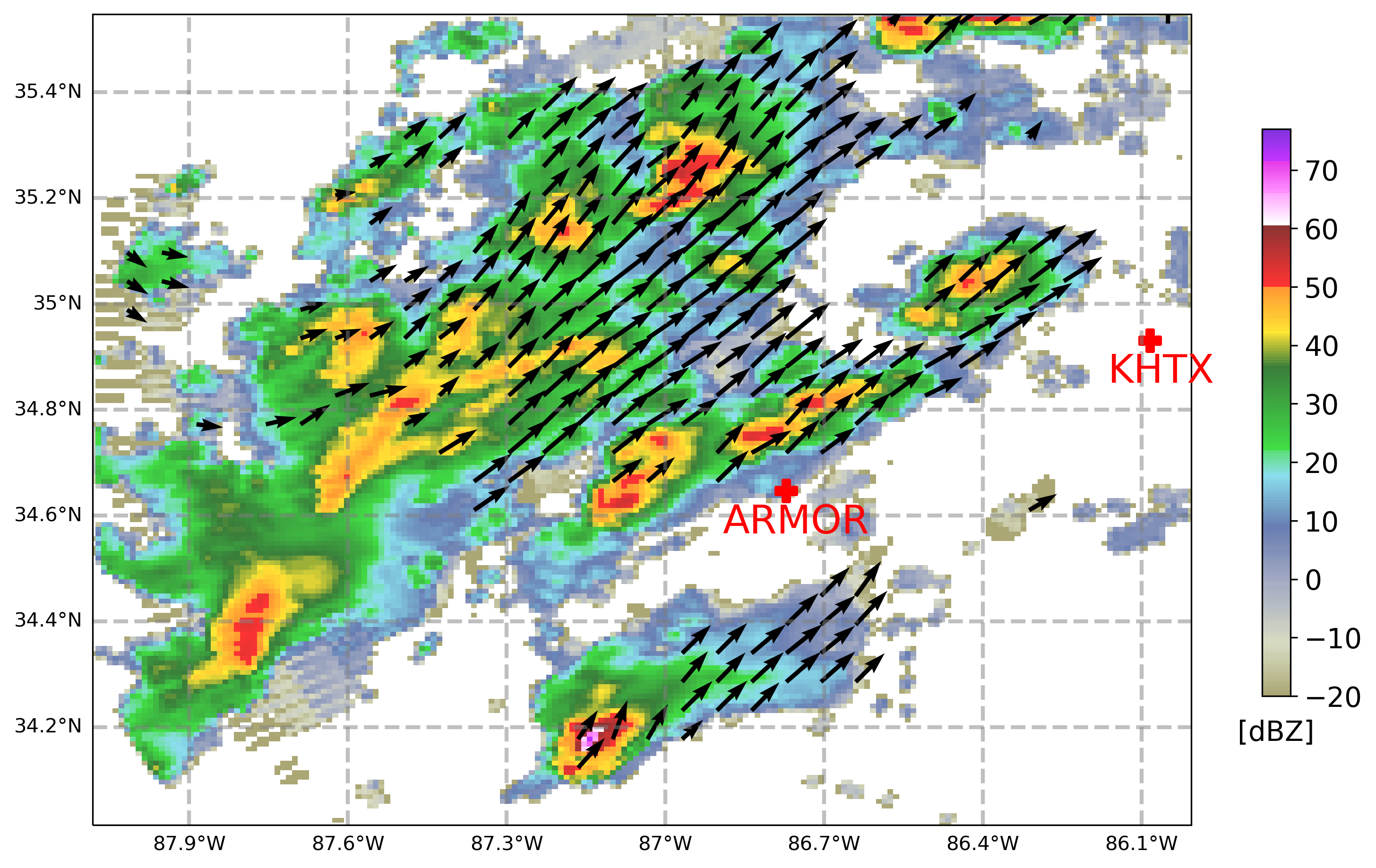
If you can see the above plot, then congratulations! You have successfully created and plotted a dual-Doppler analysis. Now let’s try SAMURAI
6. Set the SAMURAI parameters
One difference between FRACTL and SAMURAI is the requirement of a centerfile, which allows for a moving domain. Modify and run the Generate_center.pl perl script to generate a time-series of center locations by providing an estimation of the moving speed of the target and the reference location. The .cen file can be generated by typing the following command into a terminal:
./Generate_center.plModify the parameter file
Like FRACTL, most of the defaults are fine for general usage. Here are the minimum parameters that need to be set:
OPERATION SECTION
data_directory [line 197] : This is where your input data is located
output_directory [line 209] : This is where your analysis output will go
GRID DEFINITION SECTION
i_min [line 302]: I refers to the first horizontal dimension. Usually this is a Cartesian ‘x’ dimension. For cylindrical analyses (RTZ mode), this is radius. The ‘i_min’ sets the minimum value (i.e. left side) in km.
i_max [line 310]: This sets the maximum i value (right side).
i_incr [line 318]: This sets the i (usually x) grid increment in km.
j_min [line 326]: J refers to the second horizontal dimension. Usually this is a Cartesian ‘y’ dimension. For cylindrical analyses (RTZ mode), this is azimuth. The ‘j_min’ sets the minimum value (i.e. lower) in km.
j_max [line 334]: This sets the maximum j value (upper).
j_incr [line 342]: This sets the j (usually y) grid increment in km.
k_min [line 350]: K refers to the vertical dimension, which is always ‘z’ dimension. The ‘k_min’ sets the minimum value (i.e. bottom) in km. It should usually be zero.
k_max [line 358]: This sets the maximum k value (top).
k_incr [line 366]: This sets the k (always z) grid increment in km.
BACKGROUND SECTION
ref_time [line 392]: This is the reference time to which all data will be time-space corrected. It must be a valid time in the centerfile or an error will occur.
RADAR SECTION
radar_skip [line 426]: This option can be used to skip beams in the radar data. When set to ‘1’, all beams are used. Setting it to 2 speeds up the calculation and is useful for preliminary analysis. It should generally be set to 1 for final analysis.
radar_stride [line 434]: This option sets the number of gates over which averaging occurs along the beam. A stride of ‘1’ uses all data, and higher numbers average multiple gates of the given stride. Higher numbers speed up the calculation and can be used to thin the data to achieve desired spatial resolution of the input velocities.
radar_dbz [line 464]: The name of the reflectivity field in the radar data.
radar_vel [line 476]: The name of the Doppler velocity field in the radar data.
radar_sw [line 484]: The name of the spectrum width field in the radar data. This value is used to set the observational error for the Doppler velocity. If you don’t have spectrum width, you can point it at another variable (like NCP) or create a simple uniform field. This will be made optional in the next SAMURAI release.
i_reflectivity_roi [line 492], j_reflectivity_roi [line 500], k_reflectivity_roi [line 508]: These variables set the radius of influence for the reflectivity interpolation. They should be similar to the grid increments defined above.
mask_reflectivity [line 524]: The analysis can be set to missing data where there is no reflectivity. If set to ‘None’ then no masking is performed. A numerical value will be used as a threshold for the masking, with all data at nodes having less than the given reflectivity value removed. If you are not using a background field then it is generally a good idea to set this to some small number (like -10 dBZ) since the winds are not valid if there is no radar data. Alternatively, you can use the FRACTL to threshold out that data using a geometric constraint.
The following are optional parameters:
BACKGROUND SECTION
load_background [line 107]
TRUE: A first guess of the analysis stored in the
samurai_Background.inwill be loaded. This can come from a model, sounding, or other data source if available. Most of the time it is not available so it should be set to FALSE.FALSE (default setting)
adjust_background [line 132]
TRUE: the background will be adjusted to satisfy the mass continuity and match the supplied data using a variational adjustment. Without this, it is just interpolated simply to the grid.
OPERATION SECTION
mode [line 170]: The default mode is MODE_XYZ, which is Cartesian grid. You can run in cylindrical mode with MODE_RTZ. Stay tuned for more radar centric RTZ mode in the near future!
preprocess_obs [line 219]
TRUE: the raw data files will be preprocessed according to their file suffixes, and a
samurai_Observations.infile will be generated.FALSE: SAMURAI will load the observations from the
samurai_Observations.infile located in the data_directory. This is useful for generating fake data, or for saving some time if you already ran the preprocessing of lots of files.
num_iterations [line 232]: SAMURAI has the ability to take the output analysis and use it as a first guess for another analysis. This can be useful to create a ‘coarse’ analysis, followed by a ‘fine’ analysis. It is very important to set the observation and background errors appropriately if you choose this option.
BACKGROUND SECTION
ref_state [line 380]: a sounding file to define the hydrostatic reference state used in the analysis. The default is the Dunion (2011) moist tropical sounding file. The analysis is generally not sensitive to this sounding, as it is just used to provide a reference density field and fall speed relationships in most cases. If you are analyzing thermodynamic information or have a very different freezing level it may be useful to provide a more appropriate sounding. The file format is similar to that of WRF or CM1 idealized soundings.
i_background_roi [line 402], j_background_roi [line 412]: These set the background radius of influence when loading a background field.
RADAR SECTION
qr_variable [line 452]: In the default ‘dbz’ mode, the reflectivity is just interpolated and not included in the cost function minimization. If this is set to ‘qr’, then reflectivity is converted to liquid water using Z-M relationships defined in Gamache et al. (1993) and used as an additional variable in the cost function minimization. This is useful if you have other liquid water measurements to assimilate. Since this is a relatively simple Z-M it should be used with caution.
dbz_pseudow_weight [line 516]: SAMURAI has the ability to set a ‘soft’ w=0 boundary condition at echo top, and setting this weight will determine how soft or hard that constraint is enforced. Usually a hard w=0 is enforced via the spline boundary conditions at the bottom and top of the domain, so this is optional. It can be useful if the vertical velocities are believed to be too strong at the top of the cloud.
melting_zone_width [line 532], mixed_phase_dbz [line 540], rain_dbz [line 548]: SAMURAI has some basic terminal fall speed corrections that use reflectivity and Z-VT relationships. These parameters control which relationships are used depending on dbz and the height of the zero C level (which is determined from the reference sounding).
BOUNDARY CONDITIONS SECTION
Available options are R0, R1T0, R1T1, R1T2, R2T10, R2T20, R3, and PERIODIC following Ooyama (2002). The default “non”- boundary condition (R0) adds a buffer set of gridpoints that are used to calculate the solution but are discarded for output. Different boundary conditions can be set on the left (L) or right ® side of the domain for each variable and dimension. The most common option other than R0 would be R1T0 for vertical velocity (rhow = 0) at the surface and/or domain top. Periodic domains are only valid for the i and j dimension, but are available in both the XYZ and RTZ mode. Improved boundary conditions are currently in development.
OBSERVATION ERRORS SECTION
Specified error is given in terms of a standard deviation, and is fixed for all observations from a particular instrument except radar. In the radar case, the spectrum width and elevation angle (proportional to terminal fall speed contribution) are used to define the error for each radar gate. A minimum error (radar_min_error) is also enforced.
ITERATION DEPENDENT SECTION
mc_weight [line 1450]: specify the weight given to the mass continuity constraint. Default is set to 1, and is generally not recommended to change unless you have a good reason.
i_filter_length [line 1546], j_filter_length [line 1558], k_filter_length [line 1570]
Gaussian recursive filter is a low-pass filter. Smaller filter lengths retain more detail, and larger filter lengths smooth more. The general recommendation is 4, 4, 2, which removes features less than approximately 4dx, 4dy, and 2dz from the analysis.
i_spline_cutoff [line 1582], j_spline_cutoff [line 1594], k_spline_cutoff [line 1606]
Spline cutoff is implemented as a third derivative constraint on the cubic B-spline basis during the spline transform. It is a sharper filter than the Gaussian, roughly equivalent to a sixth order filter.
i_max_wavenumber [line 1618], j_max_wavenumber [line 1630], k_max_wavenumber [line 1642]
The Fourier spectral filter is the sharpest filter. It can be used for desired effects, such as explicitly removing high-wavenumber features in the spectral domain (usually for RTZ analysis), or for producing a ‘mean’ field by restricting to wavenumber zero.
7. Run SAMURAI
After modifying the parameter file, directing to the parameter file by typing the -params flags
!${LROSE_DIR}/samurai -params ${BASE_DIR}/params/wind/samurai_params
/bell-scratch/community/bin/samurai: error while loading shared libraries: libkd.so: cannot open shared object file: No such file or directory
8. Plot SAMURAI results
Load the netcdf file
inDir_s = base_dir+"/output_sam/"
file_s = "samurai_XYZ_analysis.nc"
ds_radar_s = xr.open_dataset(inDir_s+file_s).squeeze()
ds_radar_s.load()
<xarray.Dataset>
Dimensions: (longitude: 191, latitude: 171, altitude: 30)
Coordinates:
* longitude (longitude) float32 -88.08 -88.07 -88.06 ... -86.02 -86.01
* latitude (latitude) float32 34.01 34.02 34.03 34.04 ... 35.53 35.54 35.55
* altitude (altitude) float32 0.0 0.5 1.0 1.5 2.0 ... 13.0 13.5 14.0 14.5
time datetime64[ns] 2008-04-11T18:21:01
Data variables: (12/53)
x (longitude) float32 -120.0 -119.0 -118.0 ... 68.0 69.0 70.0
y (latitude) float32 -70.0 -69.0 -68.0 -67.0 ... 98.0 99.0 100.0
U (altitude, latitude, longitude) float32 nan nan nan ... nan nan
V (altitude, latitude, longitude) float32 nan nan nan ... nan nan
W (altitude, latitude, longitude) float32 nan nan nan ... nan nan
WSPD (altitude, latitude, longitude) float32 nan nan nan ... nan nan
... ...
DQVDZ (altitude, latitude, longitude) float32 nan nan nan ... nan nan
DPDZ (altitude, latitude, longitude) float32 nan nan nan ... nan nan
DRHODX (altitude, latitude, longitude) float32 nan nan nan ... nan nan
DRHODY (altitude, latitude, longitude) float32 nan nan nan ... nan nan
DRHODZ (altitude, latitude, longitude) float32 nan nan nan ... nan nan
MCRESIDUAL (altitude, latitude, longitude) float32 -0.256 0.0714 ... 0.2398- longitude: 191
- latitude: 171
- altitude: 30
- longitude(longitude)float32-88.08 -88.07 ... -86.02 -86.01
- units :
- degrees_east
array([-88.08292 , -88.07199 , -88.061066, -88.05014 , -88.03921 , -88.02828 , -88.01736 , -88.00643 , -87.99551 , -87.98458 , -87.973656, -87.96272 , -87.9518 , -87.94087 , -87.92995 , -87.91902 , -87.90809 , -87.89716 , -87.88624 , -87.87531 , -87.86439 , -87.853455, -87.84253 , -87.831604, -87.82068 , -87.809746, -87.79882 , -87.787895, -87.77696 , -87.76604 , -87.75511 , -87.74419 , -87.73325 , -87.72233 , -87.7114 , -87.70047 , -87.689545, -87.67862 , -87.66769 , -87.65676 , -87.645836, -87.6349 , -87.62398 , -87.613045, -87.60212 , -87.591194, -87.58026 , -87.569336, -87.55841 , -87.54748 , -87.53655 , -87.52562 , -87.514694, -87.50376 , -87.492836, -87.48191 , -87.47098 , -87.46005 , -87.44912 , -87.438194, -87.42726 , -87.416336, -87.4054 , -87.39448 , -87.38355 , -87.37262 , -87.361694, -87.35076 , -87.339836, -87.3289 , -87.31798 , -87.307045, -87.29612 , -87.28519 , -87.27426 , -87.26333 , -87.2524 , -87.24147 , -87.230545, -87.21961 , -87.20869 , -87.197754, -87.18682 , -87.175896, -87.16496 , -87.15404 , -87.143105, -87.13218 , -87.12125 , -87.11032 , -87.09939 , -87.08846 , -87.07753 , -87.0666 , -87.05567 , -87.04474 , -87.03381 , -87.02288 , -87.011955, -87.00102 , -86.9901 , -86.979164, -86.96823 , -86.957306, -86.94637 , -86.93545 , -86.924515, -86.91359 , -86.90266 , -86.89172 , -86.8808 , -86.869865, -86.85894 , -86.84801 , -86.837074, -86.82615 , -86.815216, -86.80429 , -86.79336 , -86.78243 , -86.7715 , -86.76057 , -86.74964 , -86.73871 , -86.72778 , -86.71685 , -86.705925, -86.69499 , -86.68406 , -86.673134, -86.6622 , -86.651276, -86.64034 , -86.62941 , -86.618484, -86.60755 , -86.59663 , -86.58569 , -86.57477 , -86.563835, -86.5529 , -86.54198 , -86.531044, -86.52012 , -86.509186, -86.49826 , -86.48733 , -86.4764 , -86.46547 , -86.45454 , -86.44361 , -86.43268 , -86.42175 , -86.41082 , -86.399895, -86.38896 , -86.37804 , -86.3671 , -86.35618 , -86.345245, -86.33431 , -86.32339 , -86.312454, -86.30153 , -86.290596, -86.27967 , -86.26874 , -86.25781 , -86.24688 , -86.235954, -86.22502 , -86.214096, -86.20316 , -86.19224 , -86.181305, -86.17038 , -86.15945 , -86.14852 , -86.137596, -86.12666 , -86.11574 , -86.104805, -86.09388 , -86.08295 , -86.07202 , -86.06109 , -86.05016 , -86.03924 , -86.028305, -86.01738 , -86.00645 ], dtype=float32) - latitude(latitude)float3234.01 34.02 34.03 ... 35.54 35.55
- units :
- degrees_north
array([34.01461 , 34.02363 , 34.032646, 34.041668, 34.050686, 34.059704, 34.06872 , 34.07774 , 34.08676 , 34.09578 , 34.104797, 34.113815, 34.122833, 34.131855, 34.140873, 34.14989 , 34.15891 , 34.167927, 34.176945, 34.185966, 34.194984, 34.204002, 34.21302 , 34.22204 , 34.231056, 34.240074, 34.249096, 34.258114, 34.26713 , 34.27615 , 34.285168, 34.294186, 34.303204, 34.31222 , 34.32124 , 34.33026 , 34.33928 , 34.348297, 34.357315, 34.366333, 34.37535 , 34.38437 , 34.393387, 34.402405, 34.411423, 34.42044 , 34.429462, 34.43848 , 34.4475 , 34.456516, 34.465534, 34.474552, 34.48357 , 34.492588, 34.501606, 34.510624, 34.51964 , 34.52866 , 34.537678, 34.546696, 34.555714, 34.56473 , 34.57375 , 34.582767, 34.591785, 34.600803, 34.60982 , 34.61884 , 34.627857, 34.636875, 34.645893, 34.65491 , 34.66393 , 34.672947, 34.681965, 34.690983, 34.7 , 34.70902 , 34.718037, 34.727055, 34.736073, 34.74509 , 34.75411 , 34.763123, 34.77214 , 34.78116 , 34.790176, 34.799194, 34.808212, 34.81723 , 34.82625 , 34.835266, 34.844284, 34.853302, 34.86232 , 34.871334, 34.880352, 34.88937 , 34.898388, 34.907406, 34.916424, 34.92544 , 34.93446 , 34.943474, 34.95249 , 34.96151 , 34.970528, 34.979546, 34.988564, 34.99758 , 35.006596, 35.015614, 35.02463 , 35.03365 , 35.042667, 35.051685, 35.0607 , 35.069717, 35.078735, 35.087753, 35.09677 , 35.105785, 35.114803, 35.12382 , 35.13284 , 35.141857, 35.15087 , 35.15989 , 35.168907, 35.177925, 35.18694 , 35.195957, 35.204975, 35.213993, 35.223007, 35.232025, 35.241043, 35.25006 , 35.259075, 35.268093, 35.27711 , 35.28613 , 35.295143, 35.30416 , 35.31318 , 35.322197, 35.33121 , 35.34023 , 35.349247, 35.35826 , 35.36728 , 35.376297, 35.38531 , 35.39433 , 35.403347, 35.412365, 35.42138 , 35.430397, 35.439415, 35.44843 , 35.457447, 35.466465, 35.47548 , 35.484497, 35.493515, 35.50253 , 35.511547, 35.52056 , 35.52958 , 35.538597, 35.54761 ], dtype=float32) - altitude(altitude)float320.0 0.5 1.0 1.5 ... 13.5 14.0 14.5
- units :
- km
array([ 0. , 0.5, 1. , 1.5, 2. , 2.5, 3. , 3.5, 4. , 4.5, 5. , 5.5, 6. , 6.5, 7. , 7.5, 8. , 8.5, 9. , 9.5, 10. , 10.5, 11. , 11.5, 12. , 12.5, 13. , 13.5, 14. , 14.5], dtype=float32) - time()datetime64[ns]2008-04-11T18:21:01
array('2008-04-11T18:21:01.000000000', dtype='datetime64[ns]')
- x(longitude)float32-120.0 -119.0 -118.0 ... 69.0 70.0
- units :
- km
array([-120., -119., -118., -117., -116., -115., -114., -113., -112., -111., -110., -109., -108., -107., -106., -105., -104., -103., -102., -101., -100., -99., -98., -97., -96., -95., -94., -93., -92., -91., -90., -89., -88., -87., -86., -85., -84., -83., -82., -81., -80., -79., -78., -77., -76., -75., -74., -73., -72., -71., -70., -69., -68., -67., -66., -65., -64., -63., -62., -61., -60., -59., -58., -57., -56., -55., -54., -53., -52., -51., -50., -49., -48., -47., -46., -45., -44., -43., -42., -41., -40., -39., -38., -37., -36., -35., -34., -33., -32., -31., -30., -29., -28., -27., -26., -25., -24., -23., -22., -21., -20., -19., -18., -17., -16., -15., -14., -13., -12., -11., -10., -9., -8., -7., -6., -5., -4., -3., -2., -1., 0., 1., 2., 3., 4., 5., 6., 7., 8., 9., 10., 11., 12., 13., 14., 15., 16., 17., 18., 19., 20., 21., 22., 23., 24., 25., 26., 27., 28., 29., 30., 31., 32., 33., 34., 35., 36., 37., 38., 39., 40., 41., 42., 43., 44., 45., 46., 47., 48., 49., 50., 51., 52., 53., 54., 55., 56., 57., 58., 59., 60., 61., 62., 63., 64., 65., 66., 67., 68., 69., 70.], dtype=float32) - y(latitude)float32-70.0 -69.0 -68.0 ... 99.0 100.0
- units :
- km
array([-70., -69., -68., -67., -66., -65., -64., -63., -62., -61., -60., -59., -58., -57., -56., -55., -54., -53., -52., -51., -50., -49., -48., -47., -46., -45., -44., -43., -42., -41., -40., -39., -38., -37., -36., -35., -34., -33., -32., -31., -30., -29., -28., -27., -26., -25., -24., -23., -22., -21., -20., -19., -18., -17., -16., -15., -14., -13., -12., -11., -10., -9., -8., -7., -6., -5., -4., -3., -2., -1., 0., 1., 2., 3., 4., 5., 6., 7., 8., 9., 10., 11., 12., 13., 14., 15., 16., 17., 18., 19., 20., 21., 22., 23., 24., 25., 26., 27., 28., 29., 30., 31., 32., 33., 34., 35., 36., 37., 38., 39., 40., 41., 42., 43., 44., 45., 46., 47., 48., 49., 50., 51., 52., 53., 54., 55., 56., 57., 58., 59., 60., 61., 62., 63., 64., 65., 66., 67., 68., 69., 70., 71., 72., 73., 74., 75., 76., 77., 78., 79., 80., 81., 82., 83., 84., 85., 86., 87., 88., 89., 90., 91., 92., 93., 94., 95., 96., 97., 98., 99., 100.], dtype=float32) - U(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- m s-1
- long_name :
- u wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - V(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- m s-1
- long_name :
- v wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - W(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- m s-1
- long_name :
- w wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - WSPD(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- m s-1
- long_name :
- wind speed
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - RH(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- percent
- long_name :
- relative humidity
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - HP(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kJ
- long_name :
- moist static energy perturbation
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - QVP(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- g kg-1
- long_name :
- water vapor mixing ratio perturbation
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - RHOAP(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-3
- long_name :
- air density perturbation
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - TP(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- temperature perturbation
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - PP(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- hPa
- long_name :
- pressure perturbation
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - VORT(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- vertical vorticity
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DIV(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- horizontal divergence
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - OW(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-10s-1
- long_name :
- Okubo-Weiss parameter
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - STRAIN(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- horizontal strain
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - TPW(altitude, latitude, longitude)float32-1.575e+03 ... -1.116e+03
- units :
- mm
- long_name :
- total precipitable water
array([[[-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059], [-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059], [-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059], ..., [-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059], [-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059], [-1575.4059, -1575.4059, -1575.4059, ..., -1575.4059, -1575.4059, -1575.4059]], [[-1547.8047, -1547.8047, -1547.8047, ..., -1547.8047, -1547.8047, -1547.8047], [-1547.8047, -1547.8047, -1547.8047, ..., -1547.8047, -1547.8047, -1547.8047], [-1547.8047, -1547.8047, -1547.8047, ..., -1547.8047, -1547.8047, -1547.8047], ... [-1125.3828, -1125.3828, -1125.3828, ..., -1125.3828, -1125.3828, -1125.3828], [-1125.3828, -1125.3828, -1125.3828, ..., -1125.3828, -1125.3828, -1125.3828], [-1125.3828, -1125.3828, -1125.3828, ..., -1125.3828, -1125.3828, -1125.3828]], [[-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356], [-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356], [-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356], ..., [-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356], [-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356], [-1116.3356, -1116.3356, -1116.3356, ..., -1116.3356, -1116.3356, -1116.3356]]], dtype=float32) - RHOU(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-2s-1
- long_name :
- mass-weighted u wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - RHOV(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-2s-1
- long_name :
- mass-weighted v wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - RHOW(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-2s-1
- long_name :
- mass-weighted w wind component
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - RHOA(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-3
- long_name :
- density
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - P(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- hPa
- long_name :
- pressure
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - T(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- temperature
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - QV(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- g kg-1
- long_name :
- water vapor mixing ratio
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - H(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kJ
- long_name :
- moist static energy
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DBZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- dBZ
- long_name :
- radar reflectivity
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - ABSVORT(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- absolute vertical vorticity
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DEWPOINT(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- dewpoint temperature
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - THETA(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- potential temperature
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - THETAE(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- equivalent potential temperature
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - THETAES(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K
- long_name :
- saturation equivalent potential temperature
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DUDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DVDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DWDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DUDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DVDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DWDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DUDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DVDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DWDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- 10-5s-1
- long_name :
- wind gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DTDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K km-1
- long_name :
- temperature gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DQVDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- g kg-1 km-1
- long_name :
- moisture gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DPDX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- hPa km-1
- long_name :
- pressure gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DTDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K km-1
- long_name :
- temperature gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DQVDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- g kg-1 km-1
- long_name :
- moisture gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DPDY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- hPa km-1
- long_name :
- pressure gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DTDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- K km-1
- long_name :
- temperature gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DQVDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- g kg-1 km-1
- long_name :
- moisture gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DPDZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- hPa km-1
- long_name :
- pressure gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DRHODX(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-3 km-1
- long_name :
- density gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DRHODY(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-3 km-1
- long_name :
- density gradient
array([[[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., ... ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]], [[nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], ..., [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan], [nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - DRHODZ(altitude, latitude, longitude)float32nan nan nan nan ... nan nan nan nan
- units :
- kg m-3 km-1
- long_name :
- density gradient
array([[[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ... [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]], [[ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], ..., [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan], [ nan, nan, nan, ..., nan, nan, nan]]], dtype=float32) - MCRESIDUAL(altitude, latitude, longitude)float32-0.256 0.0714 ... -0.1977 0.2398
- units :
- kg m-3 km-1
- long_name :
- residual from mass continuity equation
array([[[-2.55980223e-01, 7.13974312e-02, -8.86831507e-02, ..., 9.13840346e-03, -3.77809373e-03, 2.20634826e-02], [ 1.05617791e-01, 6.64404750e-01, 3.91067237e-01, ..., -2.72503905e-02, -4.87331077e-02, -4.23397683e-03], [-7.39588067e-02, 3.93604279e-01, 1.45901784e-01, ..., -1.02585321e-02, -3.03553771e-02, 8.20235442e-03], ..., [-1.94664896e-02, 6.85554892e-02, 2.36995425e-02, ..., -1.56550065e-01, -4.69985902e-01, 1.21256150e-01], [ 1.17814839e-02, 1.15420386e-01, 6.73776940e-02, ..., -5.52234948e-01, -9.38670576e-01, -5.41692786e-02], [-5.04152440e-02, 9.49170813e-03, -2.00423412e-02, ..., -1.27609437e-02, -3.17219526e-01, 3.04726392e-01]], [[-1.93549380e-01, 3.68232399e-01, 9.21617821e-02, ..., 5.26124146e-04, -2.09679678e-02, 2.17812676e-02], [ 4.12559509e-01, 1.38061249e+00, 9.48301911e-01, ..., -6.61785826e-02, -9.92047936e-02, -2.36282237e-02], [ 1.32539809e-01, 9.77312863e-01, 5.48231602e-01, ..., -3.96795608e-02, -7.29986429e-02, -4.80253343e-03], ... -4.79022324e-01, -8.35063934e-01, -8.71237144e-02], [ 5.95675521e-02, 2.41086498e-01, 1.67251736e-01, ..., -1.05101025e+00, -1.44166243e+00, -3.99649143e-01], [-4.46271449e-02, 5.94809987e-02, 9.49123409e-03, ..., -3.34771395e-01, -6.28019750e-01, 8.04112032e-02]], [[-2.65378863e-01, 8.03991407e-02, -9.03034434e-02, ..., 9.63997003e-03, -4.38243756e-03, 2.50004418e-02], [ 1.02382943e-01, 6.95189118e-01, 4.13288295e-01, ..., -2.96911355e-02, -5.31114228e-02, -2.82678334e-03], [-7.81020522e-02, 4.21872288e-01, 1.60715759e-01, ..., -1.03962012e-02, -3.23296711e-02, 1.15883676e-02], ..., [-1.80814713e-02, 7.07700327e-02, 2.53182631e-02, ..., -1.20336428e-01, -3.44180226e-01, 8.63739550e-02], [ 1.20882289e-02, 1.17139697e-01, 6.86613917e-02, ..., -4.23340201e-01, -6.98678136e-01, -6.01772442e-02], [-4.84863818e-02, 1.28833242e-02, -1.79952513e-02, ..., 1.26249008e-02, -1.97734699e-01, 2.39817411e-01]]], dtype=float32)
## Get variables:
da_s_DBZ = ds_radar_s['DBZ']
da_s_U = ds_radar_s['U']
da_s_V = ds_radar_s['V']
da_s_W = ds_radar_s['W']
lon_s, lat_s = np.meshgrid( ds_radar_s.longitude, ds_radar_s.latitude )
## Set NWS reflectivity colorbar:
ref_norm, ref_cmap = ctables.registry.get_with_steps('NWSStormClearReflectivity', -20, 0.5)
plotting_alt=3 # altitude at 3 km
plotting_var_s = ds_radar_s.DBZ.sel(altitude=plotting_alt)
plotting_var_u_s = ds_radar_s.U.sel(altitude=plotting_alt).data
plotting_var_v_s = ds_radar_s.V.sel(altitude=plotting_alt).data
plotting_lon_s = ds_radar_s.longitude
plotting_lat_s = ds_radar_s.latitude
fig = plt.figure(figsize=(12,12),facecolor='white')
ax = plt.axes(projection=ccrs.PlateCarree())
ax.coastlines('50m', linewidth=1.)
ext = 0.02
ax.set_extent([np.min(lon_s)+ext, np.max(lon_s)-ext, np.min(lat_s)+ext, np.max(lat_s)-ext], crs=ccrs.PlateCarree())
cf1 = ax.pcolormesh( plotting_lon_s, plotting_lat_s, plotting_var_s
, cmap=ref_cmap, norm=ref_norm
, alpha=0.8
, shading='auto'
, transform=ccrs.PlateCarree()
)
step = 6
cf_q = ax.quiver( plotting_lon_s[::step], plotting_lat_s[::step]
, plotting_var_u_s[::step, ::step], plotting_var_v_s[::step, ::step]
, scale=600
, width=0.004
, color='k'
, transform=ccrs.PlateCarree()
)
ax.scatter(radar_lons, radar_lats, c='r', marker='P', s=120, transform=ccrs.PlateCarree())
ax.text(radar_lons[0]-0.12, radar_lats[0]-0.08, 'ARMOR', color='r', transform=ccrs.PlateCarree(), fontsize=20)
ax.text(radar_lons[1]-0.08, radar_lats[1]-0.08, 'KHTX', color='r', transform=ccrs.PlateCarree(), fontsize=20)
gl = ax.gridlines(crs=ccrs.PlateCarree(), draw_labels=True,
linewidth=2, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
gl.xformatter = LONGITUDE_FORMATTER
gl.yformatter = LATITUDE_FORMATTER
cbar_ax = fig.add_axes([0.95, 0.3, 0.02, 0.4])
cbar = fig.colorbar(cf1, cax=cbar_ax, fraction=0.04)
cbar.ax.tick_params(labelsize=14)
cbar.ax.set_title('[dBZ]', fontsize=14, y=-0.1)
Text(0.5, -0.1, '[dBZ]')
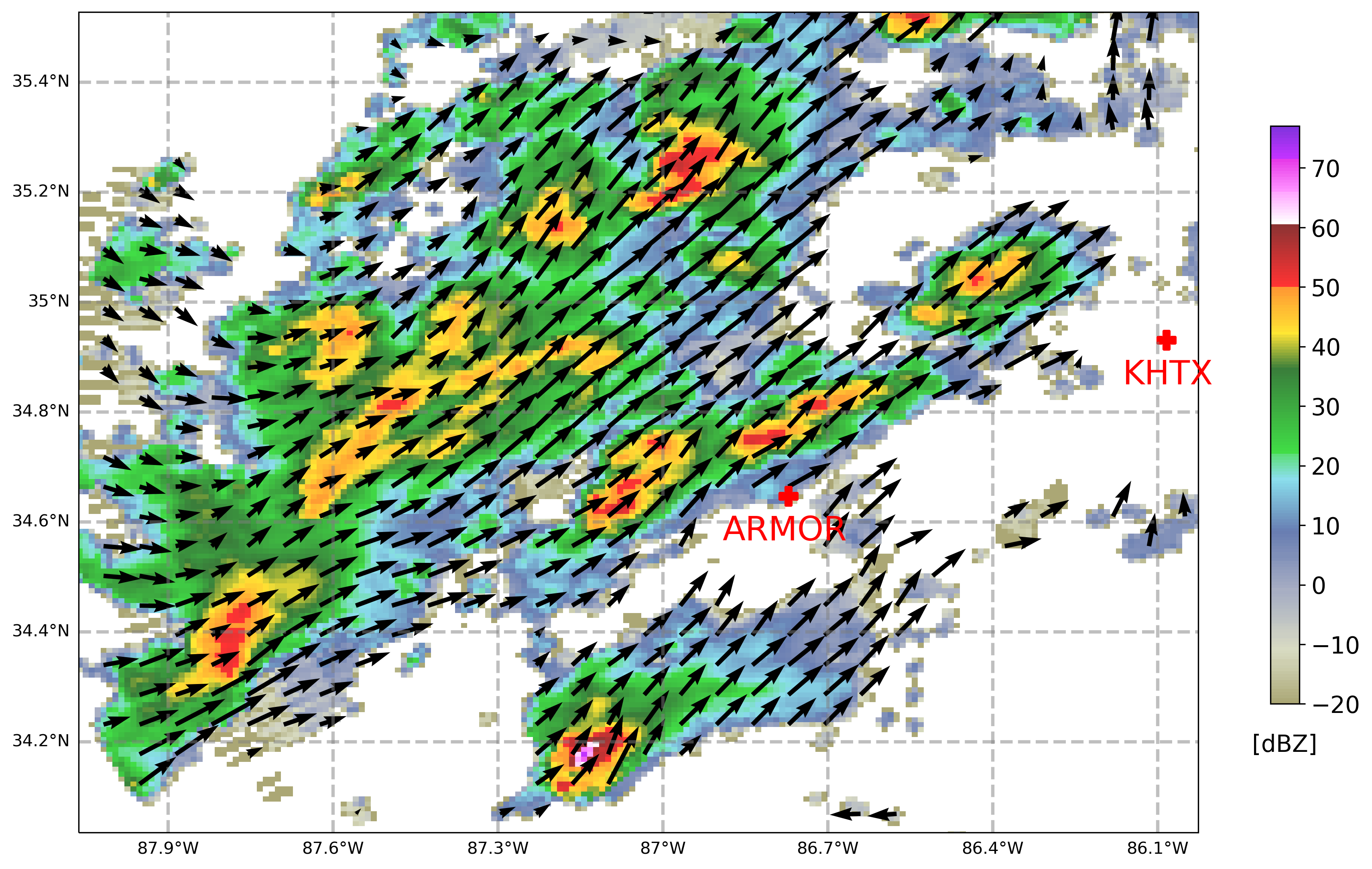
9. Apply FRACTL Condition Number
The FRACTL ‘Condition Number’ represents how well-posed the geometry is for a particular multi-Doppler retrieval. It is similar to the USTD and VSTD field from CEDRIC, which represent the standard deviation of the expected error in the resolved wind field based on the geometry. Since SAMURAI solves for the wind field globally using spline basis functions, it is difficult to calculate this error at each gridpoint. If a FRACTL analysis is run on the same domain, then it can be used to remove regions with poor geometry. Here, we use a value of 10 to threshold the SAMURAI analysis.
# Read file into radar object
inDir_f = base_dir+"/output_frac/20080411/"
file_f = "ncf_20080411_182632.nc"
ds_radar_f = xr.open_dataset(inDir_f+file_f).squeeze()
ds_radar_f
<xarray.Dataset>
Dimensions: (z0: 30, y0: 171, x0: 191)
Coordinates:
time datetime64[ns] 2008-04-11T18:26:32.190000128
* z0 (z0) float64 0.0 500.0 1e+03 ... 1.35e+04 1.4e+04 1.45e+04
* y0 (y0) float64 -7e+04 -6.9e+04 -6.8e+04 ... 9.9e+04 1e+05
* x0 (x0) float64 -1.2e+05 -1.19e+05 -1.18e+05 ... 6.9e+04 7e+04
Data variables: (12/14)
grid_mapping_0 int32 0
lat0 (y0, x0) float64 34.01 34.01 34.01 ... 35.55 35.55 35.55
lon0 (y0, x0) float64 -88.07 -88.06 -88.05 ... -86.01 -86.0
start_time float64 1.208e+09
stop_time float64 1.208e+09
W (z0, y0, x0) float32 ...
... ...
DBZ (z0, y0, x0) float32 ...
NCP (z0, y0, x0) float32 ...
conditionNumber (z0, y0, x0) float32 ...
W_std (z0, y0, x0) float32 ...
V_std (z0, y0, x0) float32 ...
U_std (z0, y0, x0) float32 ...
Attributes:
Conventions: CF-1.5- z0: 30
- y0: 171
- x0: 191
- time()datetime64[ns]2008-04-11T18:26:32.190000128
- standard_name :
- time
array('2008-04-11T18:26:32.190000128', dtype='datetime64[ns]') - z0(z0)float640.0 500.0 ... 1.4e+04 1.45e+04
- standard_name :
- height
- units :
- m
- positive :
- up
array([ 0., 500., 1000., 1500., 2000., 2500., 3000., 3500., 4000., 4500., 5000., 5500., 6000., 6500., 7000., 7500., 8000., 8500., 9000., 9500., 10000., 10500., 11000., 11500., 12000., 12500., 13000., 13500., 14000., 14500.]) - y0(y0)float64-7e+04 -6.9e+04 ... 9.9e+04 1e+05
- standard_name :
- projection_y_coordinate
- units :
- m
array([-70000., -69000., -68000., -67000., -66000., -65000., -64000., -63000., -62000., -61000., -60000., -59000., -58000., -57000., -56000., -55000., -54000., -53000., -52000., -51000., -50000., -49000., -48000., -47000., -46000., -45000., -44000., -43000., -42000., -41000., -40000., -39000., -38000., -37000., -36000., -35000., -34000., -33000., -32000., -31000., -30000., -29000., -28000., -27000., -26000., -25000., -24000., -23000., -22000., -21000., -20000., -19000., -18000., -17000., -16000., -15000., -14000., -13000., -12000., -11000., -10000., -9000., -8000., -7000., -6000., -5000., -4000., -3000., -2000., -1000., 0., 1000., 2000., 3000., 4000., 5000., 6000., 7000., 8000., 9000., 10000., 11000., 12000., 13000., 14000., 15000., 16000., 17000., 18000., 19000., 20000., 21000., 22000., 23000., 24000., 25000., 26000., 27000., 28000., 29000., 30000., 31000., 32000., 33000., 34000., 35000., 36000., 37000., 38000., 39000., 40000., 41000., 42000., 43000., 44000., 45000., 46000., 47000., 48000., 49000., 50000., 51000., 52000., 53000., 54000., 55000., 56000., 57000., 58000., 59000., 60000., 61000., 62000., 63000., 64000., 65000., 66000., 67000., 68000., 69000., 70000., 71000., 72000., 73000., 74000., 75000., 76000., 77000., 78000., 79000., 80000., 81000., 82000., 83000., 84000., 85000., 86000., 87000., 88000., 89000., 90000., 91000., 92000., 93000., 94000., 95000., 96000., 97000., 98000., 99000., 100000.]) - x0(x0)float64-1.2e+05 -1.19e+05 ... 7e+04
- standard_name :
- projection_x_coordinate
- units :
- m
array([-120000., -119000., -118000., -117000., -116000., -115000., -114000., -113000., -112000., -111000., -110000., -109000., -108000., -107000., -106000., -105000., -104000., -103000., -102000., -101000., -100000., -99000., -98000., -97000., -96000., -95000., -94000., -93000., -92000., -91000., -90000., -89000., -88000., -87000., -86000., -85000., -84000., -83000., -82000., -81000., -80000., -79000., -78000., -77000., -76000., -75000., -74000., -73000., -72000., -71000., -70000., -69000., -68000., -67000., -66000., -65000., -64000., -63000., -62000., -61000., -60000., -59000., -58000., -57000., -56000., -55000., -54000., -53000., -52000., -51000., -50000., -49000., -48000., -47000., -46000., -45000., -44000., -43000., -42000., -41000., -40000., -39000., -38000., -37000., -36000., -35000., -34000., -33000., -32000., -31000., -30000., -29000., -28000., -27000., -26000., -25000., -24000., -23000., -22000., -21000., -20000., -19000., -18000., -17000., -16000., -15000., -14000., -13000., -12000., -11000., -10000., -9000., -8000., -7000., -6000., -5000., -4000., -3000., -2000., -1000., 0., 1000., 2000., 3000., 4000., 5000., 6000., 7000., 8000., 9000., 10000., 11000., 12000., 13000., 14000., 15000., 16000., 17000., 18000., 19000., 20000., 21000., 22000., 23000., 24000., 25000., 26000., 27000., 28000., 29000., 30000., 31000., 32000., 33000., 34000., 35000., 36000., 37000., 38000., 39000., 40000., 41000., 42000., 43000., 44000., 45000., 46000., 47000., 48000., 49000., 50000., 51000., 52000., 53000., 54000., 55000., 56000., 57000., 58000., 59000., 60000., 61000., 62000., 63000., 64000., 65000., 66000., 67000., 68000., 69000., 70000.])
- grid_mapping_0()int32...
- grid_mapping_name :
- transverse_mercator
- semi_major_axis :
- 6378137.0
- semi_minor_axis :
- 6378137.0
- inverse_flattening :
- 298.257223563
- latitude_of_projection_origin :
- 34.6462
- longitude_of_projection_origin :
- -86.7715
- false_easting :
- 0
- false_northing :
- 0
array(0, dtype=int32)
- lat0(y0, x0)float64...
- standard_name :
- latitude
- units :
- degrees_north
array([[34.008044, 34.008158, 34.008271, ..., 34.012705, 34.01264 , 34.012573], [34.017061, 34.017175, 34.017288, ..., 34.021723, 34.021658, 34.021591], [34.026077, 34.026191, 34.026305, ..., 34.030741, 34.030676, 34.030609], ..., [35.522635, 35.522755, 35.522875, ..., 35.527564, 35.527495, 35.527425], [35.531649, 35.53177 , 35.531889, ..., 35.53658 , 35.536511, 35.536441], [35.540663, 35.540784, 35.540903, ..., 35.545596, 35.545527, 35.545457]]) - lon0(y0, x0)float64...
- standard_name :
- longitude
- units :
- degrees_east
array([[-88.071015, -88.060189, -88.049362, ..., -86.035052, -86.024222, -86.013393], [-88.071153, -88.060325, -88.049497, ..., -86.034974, -86.024143, -86.013313], [-88.07129 , -88.060461, -88.049632, ..., -86.034896, -86.024064, -86.013233], ..., [-88.094976, -88.08395 , -88.072924, ..., -86.021469, -86.01044 , -85.999411], [-88.095125, -88.084097, -88.073069, ..., -86.021385, -86.010355, -85.999325], [-88.095273, -88.084244, -88.073215, ..., -86.021301, -86.01027 , -85.999239]]) - start_time()float64...
- standard_name :
- start_time
- units :
- s
array(1.207938e+09)
- stop_time()float64...
- standard_name :
- stop_time
- units :
- s
array(1.207938e+09)
- W(z0, y0, x0)float32...
- standard_name :
- upward_air_velocity
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- V(z0, y0, x0)float32...
- standard_name :
- northward_wind
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- U(z0, y0, x0)float32...
- standard_name :
- eastward_wind
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- DBZ(z0, y0, x0)float32...
- standard_name :
- mean_neighbor_dbz
- units :
- 1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- NCP(z0, y0, x0)float32...
- standard_name :
- mean_neighbor_ncp
- units :
- 1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- conditionNumber(z0, y0, x0)float32...
- standard_name :
- matrix_condition_number
- units :
- 1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- W_std(z0, y0, x0)float32...
- standard_name :
- w_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- V_std(z0, y0, x0)float32...
- standard_name :
- v_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- U_std(z0, y0, x0)float32...
- standard_name :
- u_std_deviation
- units :
- m s-1
- grid_mapping :
- grid_mapping_0
[979830 values with dtype=float32]
- Conventions :
- CF-1.5
fig = plt.figure(figsize=(12,12),facecolor='white')
ax = plt.axes(projection=ccrs.PlateCarree())
ax.coastlines('50m', linewidth=1.)
plotting_var_CN = ds_radar.conditionNumber.sel(z0=plotting_alt).data
ext = 0.02
ax.set_extent([np.min(plotting_lon)+ext, np.max(plotting_lon)-ext,
np.min(plotting_lat)+ext, np.max(plotting_lat)-ext], crs=ccrs.PlateCarree())
cf1 = ax.pcolormesh( plotting_lon, plotting_lat, plotting_var_CN
#, cmap=ref_cmap, norm=ref_norm
, cmap = 'inferno_r'
,vmin=0,vmax=10
, alpha=0.8
, shading='auto'
, transform=ccrs.PlateCarree()
)
step = 4
cf_q = ax.quiver( plotting_lon[::step, ::step], plotting_lat[::step, ::step]
, plotting_var_u[::step, ::step], plotting_var_v[::step, ::step]
, scale=1000
, width=0.004
, color='k'
, transform=ccrs.PlateCarree()
)
ax.scatter(radar_lons, radar_lats, c='r', marker='P', s=120, transform=ccrs.PlateCarree())
ax.text(radar_lons[0]-0.12, radar_lats[0]-0.08, 'ARMOR', color='r', transform=ccrs.PlateCarree(), fontsize=20)
ax.text(radar_lons[1]-0.08, radar_lats[1]-0.08, 'KHTX', color='r', transform=ccrs.PlateCarree(), fontsize=20)
gl = ax.gridlines(crs=ccrs.PlateCarree(), draw_labels=True,
linewidth=2, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
gl.xformatter = LONGITUDE_FORMATTER
gl.yformatter = LATITUDE_FORMATTER
cbar_ax = fig.add_axes([0.95, 0.3, 0.02, 0.4])
cbar = fig.colorbar(cf1, cax=cbar_ax, fraction=0.04)
cbar.ax.tick_params(labelsize=14)
cbar.ax.set_title('CN', fontsize=14, y=-0.1)
Text(0.5, -0.1, 'CN')
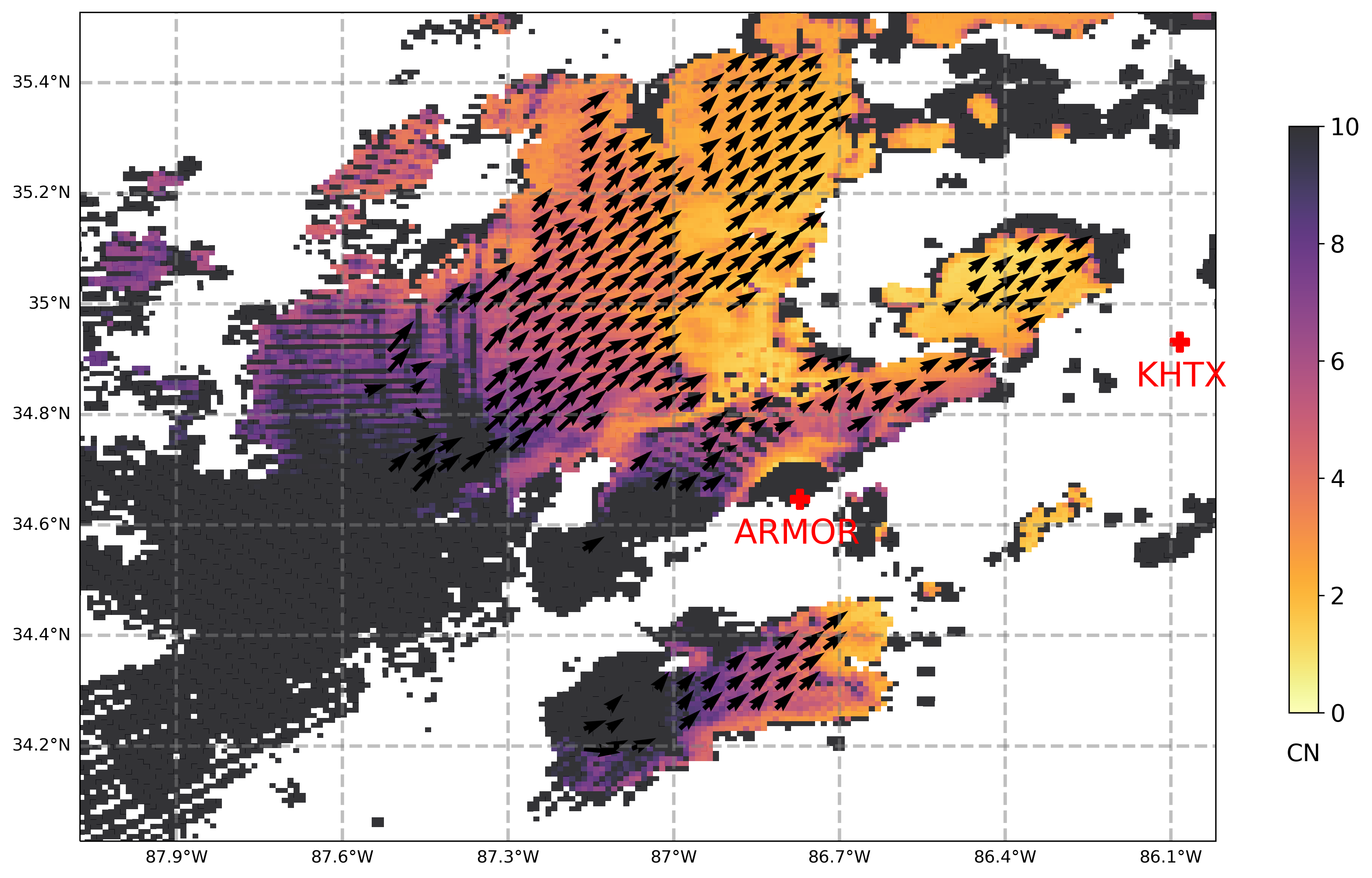
plotting_CN = ds_radar_f.conditionNumber.sel(z0=3.0*1000)
CN_threshold = 10
u_goodcondition = np.where(plotting_CN < CN_threshold, plotting_var_u_s, np.nan)
v_goodcondition = np.where(plotting_CN < CN_threshold, plotting_var_v_s, np.nan)
fig = plt.figure(figsize=(10,10))
ax = plt.axes(projection=ccrs.PlateCarree())
ext = 0.00
ax.set_extent([np.min(lon_s)+ext, np.max(lon_s)-ext, np.min(lat_s)+ext, np.max(lat_s)-ext], crs=ccrs.PlateCarree())
cf1 = ax.pcolormesh( plotting_lon_s, plotting_lat_s, plotting_var_s
, cmap=ref_cmap, norm=ref_norm
, alpha=0.8
, shading='auto'
, transform=ccrs.PlateCarree()
)
step = 6
cf_q = ax.quiver( plotting_lon_s[::step], plotting_lat_s[::step]
, u_goodcondition[::step, ::step], v_goodcondition[::step, ::step]
, scale=600
, width=0.004
, color='k'
, transform=ccrs.PlateCarree()
)
ax.scatter(radar_lons, radar_lats, c='r', marker='P', s=120, transform=ccrs.PlateCarree())
ax.text(radar_lons[0]-0.12, radar_lats[0]-0.08, 'ARMOR', color='r', transform=ccrs.PlateCarree(), fontsize=20)
ax.text(radar_lons[1]-0.08, radar_lats[1]-0.08, 'KHTX', color='r', transform=ccrs.PlateCarree(), fontsize=20)
gl = ax.gridlines(crs=ccrs.PlateCarree(), draw_labels=True,
linewidth=2, color='gray', alpha=0.5, linestyle='--')
gl.top_labels = False
gl.right_labels = False
gl.xformatter = LONGITUDE_FORMATTER
gl.yformatter = LATITUDE_FORMATTER
cbar_ax = fig.add_axes([0.95, 0.3, 0.02, 0.4])
cbar = fig.colorbar(cf1, cax=cbar_ax, fraction=0.04)
cbar.ax.tick_params(labelsize=14)
cbar.ax.set_title('[dBZ]', fontsize=14, y=-0.1)
Text(0.5, -0.1, '[dBZ]')